Виктор Петров - Искусственный спутник земли

- Название:Искусственный спутник земли
- Автор:
- Жанр:
- Издательство:Военное Издательство Министерства обороны Союза ССР
- Год:1958
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Виктор Петров - Искусственный спутник земли краткое содержание
В ней последовательно излагаются этапы освоения космоса, начиная с осуществления необитаемого и неавтоматизированного искусственного спутника Земли и кончая изложением вопросов создания межпланетных станций и космических кораблей. subtitle
3 0
/i/64/718764/Grinya2003.png
0
/i/64/718764/CoolReader.png
Искусственный спутник земли - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

Еще раз подчеркнем, что запуск ракет-носителей на определенную орбиту весьма сложное дело. Оно требует точнейшей работы ряда приборов, описание некоторых из них мы приведем ниже. Самая незначительная ошибка какого-либо из этих приборов приведет к неудаче запуска в целом.
Точность стрельбы орбитальных ракет зависит от ряда причин. Погрешность в угле возвышения вектора скорости в конце активного участка в 1° вызывает изменение высоты перигея (и апогея) на 120 км. Погрешность в скорости 30 м/сек при горизонтальном направлении вызовет изменение высоты апогея на 110 км. Если крайние высоты эллиптической орбиты искусственного спутника, например, колеблются в пределах от 370 км (перигей) до 1480 км (апогей), а конец активного участка траектории находится на высоте 560 км, то можно допустить абсолютную погрешность в угле возвышения до 2°30′ и относительную погрешность в горизонтальной скорости до 1%. Для спутника, летящего на высоте нескольких сот километров, изменение высоты полета на 300 м повлечет за собою изменение периода обращения на 0,4 сек. Изменение же начальной скорости на 30 м/сек вызовет изменение периода обращения на 70 сек. Ошибка в угле возвышения в конце активного участка траектории искусственного спутника не влияет на период его обращения. При движении спутника по эллиптической траектории его скорость меняется, причем в случае, если перигей расположен на высоте 370 км, а апогей на высоте 1480 км, разница в скорости достигает 1,22 км/сек.
Необходимая «точность стрельбы» ракет-носителей ИСЗ обеспечивается соответствующими приборами управления. Что же представляют собой эти приборы и как происходит управление полетом ракет-носителей?
6. Управление ракетой-носителем ИСЗ в полетеТраектория и режим полета ракеты, вычисленные предварительно, должны точно выдерживаться.
Вполне понятно, что для осуществления этого ракета должна иметь точнейшие приборы, работа которых будет связана с действием наземных установок.
Принцип действия большинства из них очень сложен, поэтому мы опишем в общих чертах задачи, которые будут выполняться основными приборами.
Для того чтобы ракета-носитель вышла на орбиту по рассчитанной траектории и были строго выдержаны режимы и время работы отдельных ступеней ракеты, она должна управляться на всем пути полета.
Если в пределах плотной атмосферы для изменения направления полета ракеты могут служить рули, похожие на рули реактивных самолетов, то в зоне сильно разреженной атмосферы они будут менее эффективны.
Как же будет осуществляться управление в этом случае? К. Э. Циолковским для этой цели были предложены так называемые газовые рули. Их принцип действия заключается в том, что рули, изготовляемые из тугоплавкого материала, например из графита, и располагаемые в струе вырывающихся из сопла раскаленных газов, отклоняют эту струю в ту или иную сторону и тем самым меняют направление полета ракет. Поворот газовых рулей осуществляется с помощью программного механизма или по радиосигналам с Земли.
Существует и другой способ, о котором упоминалось при описании ракеты-носителя спутника. Если ракета будет иметь не только центральные, но и боковые двигатели, то, попеременно включая или выключая последние, можно осуществить управление ракетой после выхода ее в космос.
Наконец, конструкция ракет может быть такой, что можно изменять направление струи истекающих газов, поворачивая продольную ось самого двигателя относительно продольной оси ракеты.
Такой способ управления применяется в ряде современных дальнобойных ракет.
При запуске ракеты первостепенное значение имеет стабилизация ее в полете на траектории, т. е. обеспечение того, чтобы ракета при движении не отклонилась, а точно следовала бы по заданной ей траектории полета.
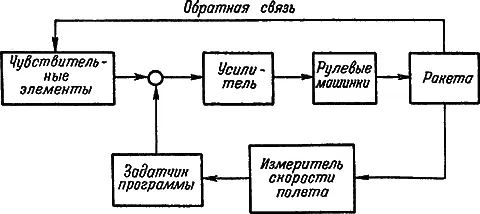
Наиболее важными узлами системы стабилизации ракеты во время ее полета является автопилот с гироскопическими чувствительными элементами. Гироскоп — особого рода волчок, вращающийся с большой угловой скоростью. Такое тело стремится сохранить неизменным направление своей оси вращения относительно мирового пространства, т. е. ось свободного гироскопа стремится сохранить то положение, которое ей было задано при запуске гироскопа. Гироскопические устройства, с помощью которых осуществляется стабилизация ракеты в полете, используют именно это свойство гироскопов. На основе таких гироскопических устройств конструкторы авиационного приборостроения создали прибор, называемый автопилотом.
Принцип работы автопилота можно уяснить из рис. 23, где показана структурная схема автопилота, управляющего угловыми положениями ракеты в полете по заданной программе. Гироскопический чувствительный элемент воспринимает угловые отклонения ракеты и дает на выходе сигнал, пропорциональный этим отклонениям. Задатчик программы автоматически вырабатывает сигналы, пропорциональные заданным угловым отклонениям ракеты. Если ракета не выполняет заданной программы полета, то разность сигналов чувствительного элемента и задатчика программы подается на усилитель, а затем на рулевые машинки, управляющие рулями ракеты. При этом рули поворачиваются в такую сторону, чтобы устранить рассогласование между заданным и фактическим угловым положением ракеты.
На некоторых ракетах, например «Фау-2» и др., автопилот имел лишь два гироскопа с тремя степенями свободы (рис. 24).

Ось первого гироскопа ( Г 1) параллельна поперечной оси ракеты, так что вращение ракеты вокруг этой оси не может быть обнаружено с помощью этого гироскопа. Он используется для управления движением ракеты относительно продольной и вертикальной осей ракеты. Управление осуществляется с помощью двух проволочных потенциометров: один ( П 2) служит для регистрации отклонений ракеты от курса, другой ( П 1) — вокруг продольной оси. Потенциометры расположены на кардановом подвесе гироскопа перпендикулярно друг другу. Сигналы, снимаемые с потенциометров, усиливаются электронными лампами и передаются на соответствующие рулевые машинки и рули. Другой гироскоп ( Г 2) служит для управления движением вокруг поперечной оси. Поворот ракеты вокруг поперечной оси воспринимается проволочным потенциометром ( П 3), сигнал с которого после усиления передается на соответствующие рули. С помощью специального вращения оси гироскопа Г 2в плоскости, параллельной нормальной и продольной осям ракеты, осуществляется поворот ракеты вокруг поперечной оси при ее движении по траектории. Это вращение, происходящее по определенной программе, должно находиться в соответствии с расчетной траекторией движения ракеты. Характер изменения угла наклона продольной оси ракеты к горизонту показан на рис. 25.
Читать дальшеИнтервал:
Закладка:


![Виктор Петров - Сага Форта Росс [Книга 1. Принцесса Елена]](/books/1072668/viktor-petrov-saga-forta-ross-kniga-1-princessa.webp)
![Виктор Петров - Призыватель демонов [СИ]](/books/1087625/viktor-petrov-prizyvatel-demonov-si.webp)