Грегори Гбур - Загадка падающей кошки и фундаментальная физика

- Название:Загадка падающей кошки и фундаментальная физика
- Автор:
- Жанр:
- Издательство:Альпина нон-фикшн
- Год:2021
- Город:Москва
- ISBN:978-5-0013-9363-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Грегори Гбур - Загадка падающей кошки и фундаментальная физика краткое содержание
В своей увлекательной и остроумной книге физик и заядлый кошатник Грегори Гбур показывает, как попытки понять механику падения кошек помогли разобраться в самых разных задачах в математике, физике, физиологии, неврологии и космической биологии, способствовали развитию фотографии и кинематографа и оказали влияние даже на робототехнику.
Поиск ответа на загадку падающей кошки погружает читателей в увлекательный мир науки, из которого они узнают решение головоломки, но также обнаружат, что феномен кошачьего выверта по-прежнему вызывает горячие споры ученых.
Автор убежден, что чем больше мы исследуем поведение этих животных, тем больше сюрпризов они нам преподносят.
Загадка падающей кошки и фундаментальная физика - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
В 1994 г. исследователи испытали робота-палочника длиной около 50 см и высотой около 25 см на неровной поверхности. Ландшафт представлял собой большой кусок упаковочного пенополистирола с перепадами высот, достигавшими 11 см. Пенополистирол был хорош для испытаний, потому что это мягкий материал, способный к тому же гнуться и пружинить, образуя нестабильную поверхность, сходную с той, на которой споткнулся «Данте II». Робот справился с задачей достойно. Он смог интегрировать и применить рефлексы подъема и поиска в комплексе и передвигался по пересеченной местности со скоростью 2 см/с {14} .
По аналогии с физиологическими исследованиями начала XX в. эта же группа ученых провела эксперименты по изучению надежности своего робота при нарушении нервных связей. Вводя «повреждения» в различные нервные соединения, исследователи смогли показать, что их робот при повреждении сохраняет значительную степень функциональности. Даже полная утрата функции одной ноги не слишком сильно затрудняла движение робота {15} .
Хотя шестиногие роботы представляли собой, образно выражаясь, впечатляющий шаг вперед, очевидно, что им необходимо стать еще более гибкими, чтобы уцелеть в неконтролируемой среде. В реальном ландшафте присутствуют уступы, размеры которых превышают размер самих роботов, так что они должны быть готовы компенсировать неожиданные падения. Это умение приобретает критическое значение для роботов, разработанных, чтобы взбираться по гладким вертикальным поверхностям, подобно роботу-геккону, построенному в 2007 г. {16} Здесь вновь обретает смысл и значение задача о падающей кошке, потенциально способная научить роботов переворачиваться в падении и приземляться на лапы с минимальным ущербом и сохранением мобильности.
Работа над созданием функционирующего робота-кошки продвигается медленнее других проектов. Если не говорить о робототехнике, то хитроумную механическую модель падающей кошки представил Джон Рональд Галли из Государственного университета Вебера в 1995 г., примерно в то же время, когда плавал роботизированный тунец и маршировал роботизированный палочник. Галли заинтересовался этой задачей, прочитав статью Клиффа Фролича 1980 г. о физике изворачивания кошки и людей-ныряльщиков. В статье Фролича описывается, без цитирования, модель «сложись и крутись» Радемакера и тер Браака {17} .
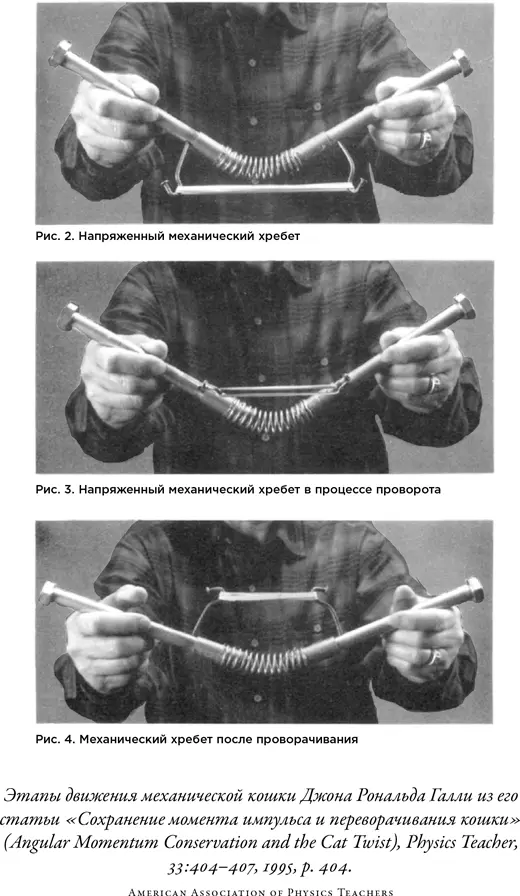
Галли построил несколько моделей кошки возрастающей сложности; действие простейшей из них показано на рисунке. Два цилиндра здесь работают как передняя и задняя половины кошки; пружина — как гибкий хребет. Резинка между двумя половинками тела действует как напряженная мышца; когда кошку выпускают из рук, напряжение резинки заставляет части тела «сложиться и крутиться», что приводит к перевороту на 180°.
Модель Галли в общем смысле можно отнести к категории биоробототехнического моделирования. Это устройство стало стандартным инструментом преподавателей физики, заинтересованных в том, чтобы объяснить задачу своим студентам. До недавнего времени доработанный вариант кошки Галли можно было приобрести онлайн, в комплекте с лапами, дополнительными секциями хребта и проволочной кошачьей мордой.
Создать надежную «кошачью» стратегию переворачивания в воздухе для робота более сложная задача. Поскольку кошка может падать под разными углами (в перевернутом состоянии, на боку, головой вниз и т. д.) и начинать падение с ненулевым или нулевым моментом импульса, ни один простой сценарий не позволит ей выправить положение в любой ситуации. Точное движение, при помощи которого перевернутая кошка сможет приземлиться в правильном положении, в другом случае, к примеру, перевернет кошку, падающую боком, на другой бок. Кошка — или робот — в падении должна принимать во внимание конкретные обстоятельства своего падения и соответствующим образом адаптировать стратегию, причем часто за долю секунды.
Сложность разработки робота, который способен был бы это делать, восходит опять же к задаче буриданова осла. Поскольку кошка может, в принципе, использовать множество разных методов переворачивания в правильное положение, то, если мы введем условие переворачивания за кратчайшее время, два метода могут показать одинаковую продолжительность, и тогда робот приземлится на спину только потому, что не смог сделать выбор. Как отметили исследователи: «Вопрос общей стратегии и контролируемого подхода к проблеме изменения ориентации сложной мультисегментной, мультисуставной системы без использования внешнего крутящего момента остается в значительной степени нерешенным. Сложность ответа на этот вопрос кроется в том факте, что в целом существует бесконечное число способов, при помощи которых мультисегментная мультисуставная система может произвольным образом изменить ориентацию в пространстве без применения внешнего эффективного крутящего момента» {18} .
Поэтому для создания робота, который не будет застревать между двумя в равной степени хорошими методами переворачивания, инженер должен ввести очень точное определение «хорошего» способа — определение, которое в любых возможных обстоятельствах позволит использовать лишь один возможный метод. Вот почему многие исследования переворачивания кошки сосредотачиваются исключительно на математическом решении этой задачи. В одной из ранних статей фотографии падающей кошки использовались для изучения роли вестибулярного аппарата в управлении движением падающей кошки {19} . Эта работа не имела отношения к робототехнике, но ее результаты послужат будущим исследователям ориентиром.
В 1998 г. Ара Арабян и Дерлян Цай из Университета Аризоны разработали алгоритмическую схему управления падающей кошкой, которая позволила бы ей успешно перевернуться. Эта схема, так же как ранее схема управления для шестиногих роботов, была децентрализованной; исполнительные механизмы, обеспечивающие работу суставов, должны были взаимодействовать между собой и обеспечивать обратную связь подобно проприоцептивным рефлексам. Авторы наложили на движение кошки несколько ограничений, как с самого начала предлагали сделать Кейн и Шер, чтобы ограничить трудность задачи, требующей решения, и вследствие этого избежать столкновения с буридановым ослом. Одно из созданных ими модельных решений задачи падающей кошки вполне сравнимо по качеству с компьютерной анимацией конца 1990-х гг. Как указывают авторы, результат их компьютерного моделирования очень близок к реальным фотографиям падающей кошки {20} .
Работа над математической стороной задачи о падающей кошке продолжается и в новом тысячелетии. В 2007 г. китайские исследователи использовали для поиска решений этой задачи метод, известный как неголономное планирование движения. В 2008 г. израильские исследователи предложили забавную модель «квадратной кошки», в которой кошка представляет собой четыре стержня равной длины, соединенные гибкими суставами, чтобы прояснить некоторые глубокие математические стороны задачи. В 2013 г. Ричард Кауфман из Массачусетского университета в Лоуэлле представил «электрическую кошку» — простую механическую модель животного, демонстрирующую маневр типа «сложись и крутись». Кауфман, в частности, пришел к выводу, что стратегии «сложись и крутись» более чем достаточно для реализации кошачьей способности и что метод «подожмись и поворачивайся» Марея играет в процессе в лучшем случае вторичную роль. В 2015 г. другая группа китайских исследователей применила для изучения динамики падающей кошки сложный математический аппарат — уравнение Удвадиа — Калабы {21} .
Читать дальшеИнтервал:
Закладка: