Грегори Гбур - Загадка падающей кошки и фундаментальная физика

- Название:Загадка падающей кошки и фундаментальная физика
- Автор:
- Жанр:
- Издательство:Альпина нон-фикшн
- Год:2021
- Город:Москва
- ISBN:978-5-0013-9363-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Грегори Гбур - Загадка падающей кошки и фундаментальная физика краткое содержание
В своей увлекательной и остроумной книге физик и заядлый кошатник Грегори Гбур показывает, как попытки понять механику падения кошек помогли разобраться в самых разных задачах в математике, физике, физиологии, неврологии и космической биологии, способствовали развитию фотографии и кинематографа и оказали влияние даже на робототехнику.
Поиск ответа на загадку падающей кошки погружает читателей в увлекательный мир науки, из которого они узнают решение головоломки, но также обнаружат, что феномен кошачьего выверта по-прежнему вызывает горячие споры ученых.
Автор убежден, что чем больше мы исследуем поведение этих животных, тем больше сюрпризов они нам преподносят.
Загадка падающей кошки и фундаментальная физика - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Чем дальше исследователи изучают движение животных, тем больше они обнаруживают различных методов самостоятельного переворачивания в воздухе. В статье, заголовок которой может, пожалуй, претендовать на второе место — «Воздушные маневры прыгающих лемуров» (Aerial Maneuvers of Leping Lemurs), — Дональд Данбар из Университета Пуэрто-Рико исследовал необычные способы смены ориентации в воздухе у кольцехвостых лемуров {30} . Лемур часто прыгает, находясь высоко на дереве лицом к стволу; при этом он способен перепрыгнуть на другое дерево и оказаться на нем тоже лицом к стволу. В этом случае лемур использует две стратегии: он начинает поворот, когда еще держится за дерево — «Модификация момента импульса до отрыва от земли», и подправляет при помощи хвоста свое вращение перед приземлением — «Изменение ориентации тела посредством движения конечности».
Даже крылатые существа пользуются необычными техниками самоориентации. В 2015 г. исследователи из Университета Брауна продемонстрировали, что очковые листоносы и более мелкие коротконосые крыланы при выполнении замечательно быстрых воздушных маневров управляют инерцией своих крыльев {31} . Эту стратегию можно рассматривать как аналогичную модели «подожмись и поворачивайся» у кошек, только роль двух половинок тела кошки здесь играют крылья. Если поджать одно крыло, то второе будет разворачивать тело мыши гораздо сильнее. Исследователи предполагают, что знание этой техники поможет расширить возможности и улучшить маневренность летающих роботов.
Но строились ли где-нибудь реальные физические модели роботизированных кошек? Еще в 1992 г. японские исследователи изучали модель переворачивания кошки типа «сложись и крутись» методами робототехники; возможно, именно их робот был первым реальным роботом, основанным на принципе падающей кошки. Оригинальная статья вышла на японском языке; в 2014 г. один из авторов, Такаси Кавамура из Университета Синсю, опубликовал краткое описание работы на английском языке {32} . Эта модель кошки немного напоминала механическую кошку Галли из двух цилиндров, соединенных гибкой перемычкой, но в ней использовалась активная схема управления. «Мышцы» представляли собой исполнительные устройства на пневматической тяге, что позволяло активно контролировать робота в свободном падении. Однако целью японцев было не создание универсального самопереворачивающегося робота, а всего лишь проверка гипотезы «сложись и крутись».
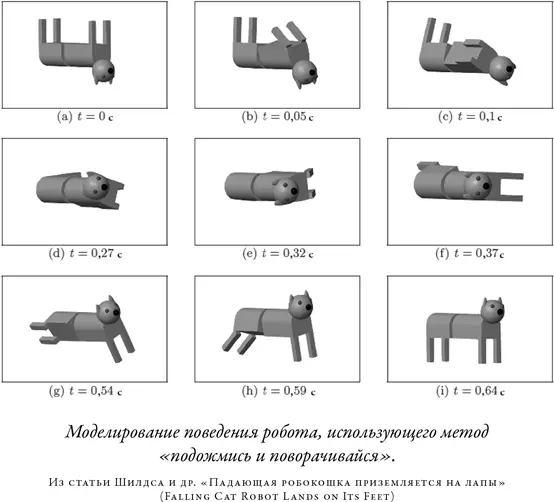
Большая часть работы по роботизированным кошкам относится к самому последнему времени и находится пока на начальных этапах — в основном, кажется, из-за трудностей с разработкой надежной управляющей системы. В 2013 г. исследователи из Аделаидского университета провели моделирование робота, имитирующего падающую кошку {33} . Столкнувшись с разнообразием предлагаемых стратегий переворачивания в воздухе, ученые австралийской группы решили сосредоточиться на разработке робота, способного воплотить оригинальную модель Марея «подожмись и поворачивайся». Их моделирование, которое вы можете здесь видеть, предсказывает переворот кошки немногим больше чем за полсекунды. Исследователи планируют построить работающий прототип.
В 2014 г. группа Карен Лю из Технологического института Джорджии сумела построить по образцу кошки робота, способного динамически подправлять свое положение в воздухе, чтобы принять нормальную ориентацию. Внешне этот робот не слишком похож на кошку. Он построен в виде трех соединенных шарнирами секций, которые способны сгибаться независимо друг от друга и управлять ориентацией по Кауфману, при помощи неголономного планирования движения. Их робот был не готов к скорости и ударам реального свободного падения, поэтому исследователи испытывали его в скольжении вниз по наклонной доске, с многообещающими результатами. Работа привлекла к себе внимание всей страны, хотя некоторые статьи представляли ее выводы с некоторой иронией: «Так что в далеком будущем, когда вы увидите, что со скалы на вас сверху прыгает ужасный робот, вы сможете сказать, что во всем виновата кошка» {34} .
В 2017 г. и другие группы добились значительного прогресса в задаче о падающей робокошке. В ходе совместного проекта исследователи из Британии и Ирана разрабатывали модели робокошек возрастающей сложности — из двух секций, затем из трех, затем из восьми — и проектировали для машины систему управления, которая избегала бы «сингулярностей», то есть умела бы обходить проблему буриданова осла. Постройка прототипа планируется {35} .
Стоит упомянуть также падающего робота, которого спроектировали Морган Поуп и Гюнтер Нимейер в лаборатории сети Disney Research в 2017 г. {36} Их машина вообще не похожа на кошку. Она выглядит как обвешанный схемами кирпич, называется подходяще — «Бинарный роботизированный инерциально управляемый кирпич» (Binary Robotic Inertially Controlled brick, BRICK) — и меняет ориентацию в воздухе согласно представлениям Максвелла. Кирпичу перед падением придается быстрое горизонтальное вращение, а далее он внутренне управляет своим моментом инерции и меняет тем самым скорость вращения. Ученым удалось показать, что такой робот способен самостоятельно менять ориентацию в достаточной степени, чтобы успешно пролететь сквозь отверстие в форме кирпича.
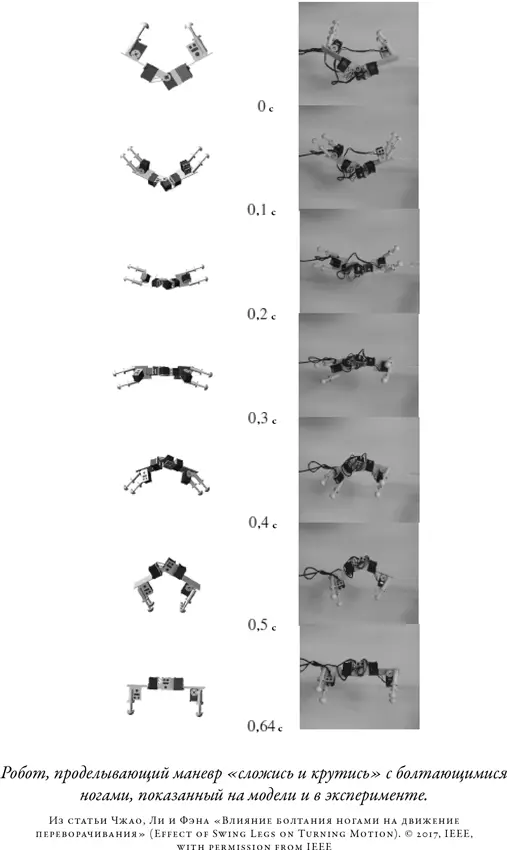
Первый, возможно реальный электронный прототип робота, имитирующего падающую кошку, внешне хотя бы отдаленно напоминающий кошку, построили три китайских исследователя — Цзясюань Чжао, Лу Ли и Баолинь Фэн {37} . Модель кошачьего переворачивания, которую они используют, основана в первую очередь на методе «сложись и крутись», но при этом ногам робота позволено свободно болтаться на шарнирах, чтобы оптимизировать движение. Сам робот, хотя и производит сильное впечатление, действует, судя по всему, по заранее прописанному жесткому алгоритму и не оценивает оптимальные для приземления движения на лету, как это делает реальная кошка. В робототехнике падающей кошки полное согласование математики и механизмов пока не достигнуто.
Обычные шагающие и бегающие роботы, однако, к настоящему моменту сделали резкий рывок в своем развитии. Начиная с 2013 г. компания Boston Dynamics разрабатывает гуманоидного робота по имени Атлас, обладающего поразительной степенью координации. Атлас — крупный образец, его рост составляет примерно 180 см, а весит он около 150 кг. В 2017 г. компания выпустила видеосюжет, в котором Атлас запрыгивает на ящики и даже делает сальто назад. Еще через год она выпустила видеосюжет, в котором Атлас бегает по траве и пересеченной местности. Как написал в сети один комментатор, «теперь робот Атлас компании Boston Dynamics сможет гоняться за вами по лесу» {38} . Если оставить в стороне апокалиптические прогнозы, то Атлас показывает, какой путь развития прошли роботы с того времени, когда «Данте II» безуспешно пытался выбраться из вулканического кратера на шести ногах. Тем не менее роботов не стали меньше бояться с тех пор, когда 100 лет назад на свет появился Геркулес, паровой родич Атласа.
Читать дальшеИнтервал:
Закладка: