В. Ковалёв - Балансировка роторов

- Название:Балансировка роторов
- Автор:
- Жанр:
- Издательство:Литагент Ридеро
- Год:неизвестен
- ISBN:9785447476236
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Ковалёв - Балансировка роторов краткое содержание
Балансировка роторов - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Исходя из этого, используя соотношение (2), можно оценить значение дисбаланса, которого можно добиться при статической балансировке.
D ст.= 0,05m гмм
Если подставить в формулу (1) значения:
F ц=0,3Р-допустимое предельное значение центробежной силы,
r = е ст= 0.05мм,
то можно подсчитать частоту вращения, до которой можно применять статическую балансировку n ст.≈ 2300об/мин.
Следует отметить, что известно множество устройств для статической балансировки [4], позволяющих увеличить её точность. Однако в настоящий момент эти устройства мало распространены, так как широко стала использоваться динамическая балансировка, которая вытеснила устройства для статической балансировки в силу их ограниченных возможностей.
Иногда при статической балансировке корректирующие массы распределяются на две плоскости коррекции. В этом случае при распределении масс используются соотношения (4), приведённые ниже на рис.6.
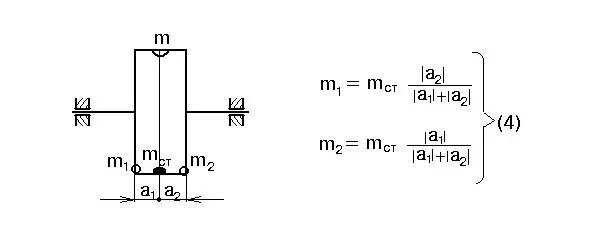
Рис.6
3. Динамическая балансировка
3.1. Общие сведения
Динамическая балансировка — это такая балансировка, при которой определяются и уменьшаются дисбалансы ротора, характеризующие его динамическую неуравновешенность (см. рис.4). При динамической балансировке уменьшаются как моментная, так и статическая неуравновешенность ротора одновременно.
Есть много методов балансировки. Все они основаны на предположении линейности системы, то есть амплитуды колебаний считаются пропорциональными значению дисбаланса, а фазы независимы от его величины. Существует одноплоскостная и многоплоскостная балансировка. При одноплоскостной балансировке расчёт корректирующих масс производится последовательно для каждой плоскости коррекции, при многоплоскостной – одновременно.
3.2. Одноплоскостная балансировка
Одноплоскостная балансировка может осуществляться различными методами. Рассмотрим некоторые из них.
3.2.1. Метод обхода пробной массой. Этот метод в настоящее время применяется крайне редко. Однако он хорошо поясняет сущность балансировки и может быть полезен для понимания процесса балансировки.
Окружность, лежащая в плоскости коррекции, делится на 8 частей (см. рис.7), и отмечаются точки через 60 o. В каждую точку поочерёдно устанавливается пробная масса m пр. Без пробной массы, а затем при каждой установке производится пуск, и измеряются амплитуды колебаний А 0,А 1, А 2,…А 8. По полученным данным строится зависимость изменения амплитуды от места установки пробной массы. При приближении места установки к месту расположения дисбаланса амплитуда будет увеличиваться. Минимальная амплитуда будет соответствовать случаю, когда место установки пробного груза находится напротив дисбаланса. Место установки корректирующей массы m коропределяется по минимальной амплитуде колебания, а её значение подсчитывается по формуле:
m кор= m прА 0/ А 0-А мин
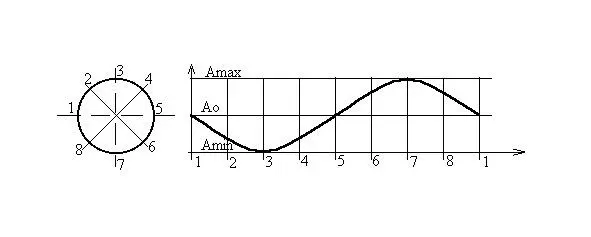
Рис.7
3.2.2. Метод трёх пусков без измерения фаз.
При балансировке с помощью такого метода проводится три пуска с одной пробной массой m пр, устанавливаемой последовательно через 120 она одном радиусе. При пусках измеряют амплитуды колебаний А 01, А 02, А 03. По результатам измерений амплитуд колебаний с помощью графических построений производится расчёт необходимых корректирующей массы и угла её установки.
Для графического решения задачи из центра О (см. рис.8) описывают три окружности радиусами А 01, А 02, А 03. На этих окружностях путём подбора располагают вершины равностороннего треугольника АВС вписанного в окружность с центром О 1, радиус которого r в масштабе отображает m пр. Величина корректирующей массы m корнаходится из соотношения:
m кор= m прОО 1/r
Угол дисбаланса δ относительно первого положения пробной массы находится по чертежу (рис.8). Следовательно, напротив дисбаланса необходимо установить корректирующую массу.
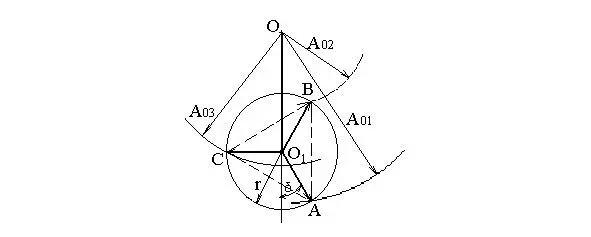
Рис.8
3.2.3. Метод, основанный на измерении амплитуды и фазы.
Этот метод легко реализуется с помощью современных балансировочных средств. Балансировщик, используя современные балансировочные средства, не видит, каким образом производится расчёт корректирующей массы и место её установки. Поэтому сущность этого метода поясняется графически с помощью рис.9.
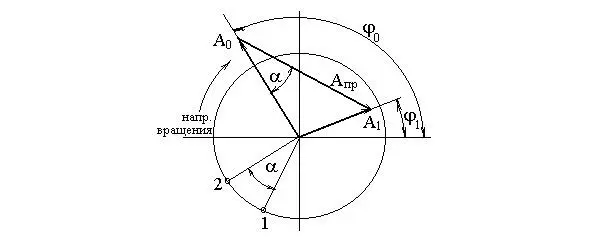
Рис.9
При первом (нулевом) пуске измеряют амплитуду и фазу колебаний А 0, φ 0.
После установки пробной массы в произвольную точку 1 (см. рис.9) вновь измеряют амплитуду и фазу колебаний А 1,φ 1. Нахождение значения и места установки корректирующей массы поясняется с помощью векторной диаграммы, приведенной на рис.9. Проводятся вектора Ā 0и Ā 1, затем строится вектор влияния пробной массы Ā пр =Ā 0 – Ā 1. Следовательно, для компенсации вектора дисбаланса необходимо вектор пробного груза повернуть на угол α по вращению и сделать его значение равным А 0. Для этого необходимо в точку 2, отстоящую от точки 1 на угол α, установить корректирующую массу m корисходя из соотношения:
m кор= m прА 0/А пр
3.3. Многоплоскостная балансировка
Многоплоскостная балансировка с использованием метода одновременного измерения амплитуд и фаз колебаний наиболее распространена. Точнее, наиболее распространена двухплоскостная балансировка, которая является частным случаем многоплоскостной. Для расчёта корректирующих масс при таком методе балансировки необходимо выполнить, как минимум, три пуска: один начальный (нулевой) и два пробных с единичными (пробными) массами m п1, m п2, установленными на расстояниях r п1, r п2от оси вращения (см. рис.10). Порядок и комбинации установок пробных грузов могут быть различными.
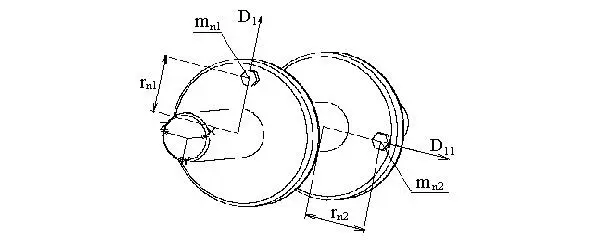
Рис.10
При использовании этого метода балансировки считают, что система позволяет использовать принцип суперпозиции. Расчёт корректирующих масс и мест их установки в такой системе может производиться различными способами: графическим, аналитическим или графоаналитическим.
Графические и графоаналитические расчёты с построением достаточно сложных векторных диаграмм широко использовались до появления балансировочных средств с микропроцессорами. Приёмы выполнения таких расчётов изложены в литературе [5]. В настоящее время они практически не используются, так как современная техника обеспечивает решение таких задач проще, точнее и быстрее. Говоря о точности расчётов, следует иметь в виду, что все расчёты основаны на предположении, что система линейна. Так как линейность механических систем не идеально, то поэтому при балансировке не всегда удаётся достичь желаемого результата минимальным количеством пусков.
Читать дальшеИнтервал:
Закладка: