Владислав Масликов - Универсум. Общая теория управления

- Название:Универсум. Общая теория управления
- Автор:
- Жанр:
- Издательство:Array Литагент «Алгоритм»
- Год:2015
- Город:Москва
- ISBN:978-5-906798-28-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владислав Масликов - Универсум. Общая теория управления краткое содержание
Посредством универсумного подхода к процессам управления можно решать практические задачи в самых различных областях научного знания: в производственной сфере, экономике, социологии и других сферах деятельности, по мере необходимости переходя с уровня систематизации фактов к моделированию процессов, затем к целенаправленному прогнозированию и управлению ими. Текст сопровождается большим количеством иллюстративного материала – рисунками, схемами, таблицами, позволяющими легко понимать представленный материал.
Работа рассчитана не только на специалистов в области теории управления, но и философов, социологов и конструкторов сложных автоматизированных систем. Также адресована преподавателям, аспирантам, студентам и всем, кого интересуют принципы организации и работы интеллекта.
Универсум. Общая теория управления - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
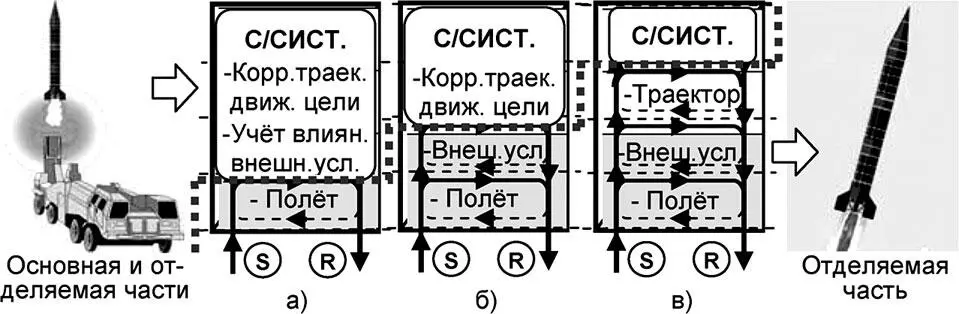
Рис. 5.5. Интегративные принципы работы ракетных комплексов класса 4U
а) программный; б) адаптивный; в) предикционный
Конечно же, на практике возможны модификации ракетного комплекса с различными вариантами использования гироскопов, аналоговым и цифровым управлением, активными и пассивными боеголовками, возможностями перенацеливания и т. д., но базовая, универсумная классификация систем при этом останется неизменной.
5.2. Программная схема управления
Алгоритмика выработки управляющего решения при программном управлении (рис. 5.6) определяется теми простыми и жёсткими программами, которые представляют максимально материальные составляющие универсума.
Программная система ОУ, созданная внешней по отношению к ней суперсистемой СУ, учитывающей прошлый опыт поведения ОУ в заданных условиях, предусматривает отработку достаточно простого спектра внешних воздействий S. Все варианты S как цепь обратной связи (ОС) чаще всего учтены прямо в конструкции СУ: движущиеся в вязкой среде объекты имеют заострённую форму, конструкция ОУ должна выдерживать максимальные нагрузки сжатия-растяжения при изменении траектории, выдерживать определённый температурный режим и т. д. Можно сказать, что функции ОС, содержащей опыт прошлых событий, выполняет внешний по отношению к ОУ интеллект (СУ). Цепь прямой связи (ПС) учитывает всю эту информацию при переводе ОУ в рабочий режим.
Таким образом, работа программной схемы, размещённой в ракете, (рис. 5.7) в настоящем времени (точка Н на оси времени) подчиняется жёсткому алгоритму, составленному внешним по отношению к ней интеллектом, собравшим и проанализировавшим определённый опыт прошлых (точка П) событий. Прогноз поведения ракеты R с учётом прошлого опыта (П) осуществляет внешний интеллект (боевой расчёт), направляющий ракету на цель (S), который в настоящем времени (Н) выдаёт его в виде ПС – задания на поражение цели.
Ракета способна попасть в цель только в том случае, если в момент её пуска (Н) внешним по отношению к ней интеллектом заранее были учтены все необходимые условия, сопутствующие её полёту к цели. Если внешние условия при полёте ракеты соответствуют учтённым условиям прошлого опыта (П), то ракета имеет все шансы на достижение цели.

Рис. 5.6. Субъектно-объектная схема программного управления
В случае же возникновения каких-то неучтённых факторов среды (например, смены направления ветра) в реальных условиях ракета пройдёт мимо цели.
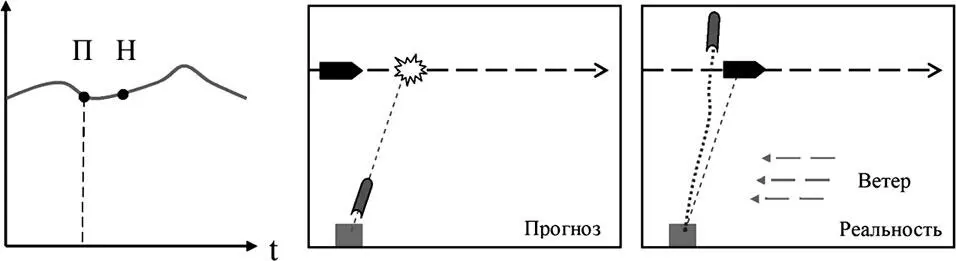
Рис. 5.7. Пример функционирования системы с программным управлением
Соответствие программной схемы методам управления очевидно: ПС имеет декларативный характер. С точки зрения управления общественными процессами – это «ручной режим» управления (высший руководитель берёт на себя адаптационные и предикционные функции, отдавая низовым исполнителям прямые распоряжения). Содержание ОС ограничивается лишь прошлым опытом – ожиданием исполнения команд, поступающих по цепи ПС.
В более общем смысле эта схема управления связана с понятием «застой» (социальный, экономический, политический и т. п.). Эта схема не обеспечивает необходимую степень устойчивости системы к внешним воздействиям. При отсутствии изменений во внешней среде программа позволяет системе уверенно держаться заданной траектории, но любое мало-мальски нетривиальное воздействие внешних факторов при видимом сохранении неизменности целевой установки меняет траекторию движения системы так, что она не достигает цели.
В программной схеме управления роль ОС можно считать как 100 %-ной, так и нулевой [134]и не учитывать. Хотя при этом следует понимать, что программный режим – это не отсутствие памяти и ОС, а память и ОС, жёстко зафиксированная в структуре взаимосвязей элементов нижнего универсумного уровня. Любые динамические значения ОС, способные возникнуть на этапе осуществления процесса управления на основании прошлого опыта прямо и жёстко, заранее самим СУ учтены и внесены в конструктивные особенности ОУ.
В терминах алгоритмического описания ОУ можно сказать, что программная схема при выполнении условных переходов использует не динамические значения переменных, а фиксированные константы.
5.3. Адаптивная схема управления
Адаптивное (или программно-адаптивное) управление предусматривает размещение в ОУ более сложного комплекса конструктов, позволяющего на этапе достижения цели учитывать воздействие изменяющихся факторов внешней среды (рис. 5.8).
Работа адаптивной схемы управления отделяемой части интегранта – ракете в настоящем подчиняется более гибкому алгоритму, составленному внешним по отношению к ней интеллектом СУ. Она основана не только на определённом опыте прошлых событий (первая точка на оси времени – П, рис. 5.9), но и на более развитой базе этого опыта, предусматривающего ряд возможных стереотипных ситуаций, способных повлиять на траекторию ракеты на этапе её полёта к цели в настоящем времени (вторая точка на оси времени – Н). Внешний интеллект – боевой расчёт, направляющий ракету на цель, теперь может осуществлять менее точный прогноз её поведения, поскольку система управления ракетой при полёте сможет адаптироваться к более широкому спектру изменений в окружающем мире.
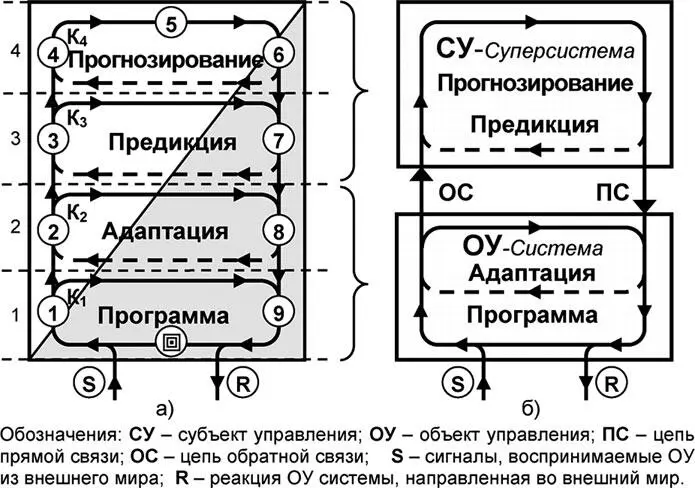
Рис. 5.8. Субъектно-объектная схема адаптивного управления
Теперь ракета способна попасть в цель даже в том случае, если в момент её пуска интеллектом заранее не были учтены все необходимые условия, сопутствующие её полёту к цели. В процессе полёта траектория ракеты посредством включённых в её систему управления гибких алгоритмов, сможет адаптироваться к запрограммированным для отработки условиям. Так, при возникновении ветра ракета сбалансирует, подкорректирует своё положение в пространстве, автоматически вернувшись на ранее заданную внешним интеллектом траекторию.
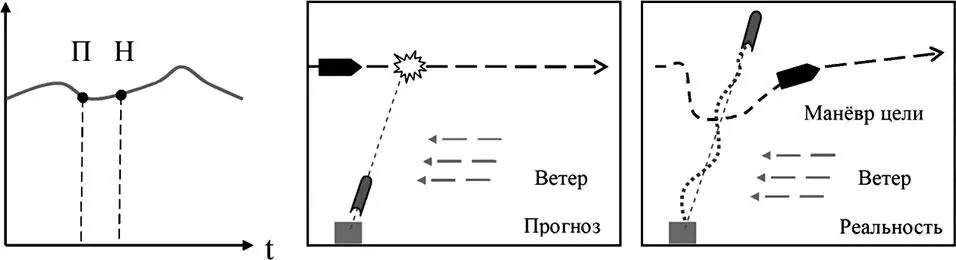
Рис. 5.9. Функционирование системы с программно-адаптивным управлением
Несмотря на более высокую гибкость системы, в случае возникновения неучтённых факторов среды, вызывающих изменение расчётной траектории цели (например, осуществления резкого манёвра), в реальных условиях ракета всё же может пройти мимо цели.
Читать дальшеИнтервал:
Закладка: