Джереми Блум - Изучаем Arduino: инструметы и методы технического волшебства

- Название:Изучаем Arduino: инструметы и методы технического волшебства
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2015
- Город:Санкт-Петербург
- ISBN:978-5-9775-3585-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джереми Блум - Изучаем Arduino: инструметы и методы технического волшебства краткое содержание
Для радиолюбителей
Изучаем Arduino: инструметы и методы технического волшебства - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Сервоприводы управляются по сигнальной линии с помощью прямоугольных импульсов регулируемой длительности. Для стандартного сервопривода подача импульса длительностью 1 мс приводит к установке сервопривода в положение 0 °, импульс длительностью 2 мс устанавливает сервопривод в положение 180°, импульса 1,5 мс - 90 °. После того как импульс подан, вал сервопривода устанавливается в определенную позицию и остается там до поступления следующей команды.
Тем не менее, чтобы постоянно поддерживать точное положение вала сервопривода, необходимо отправлять сигнальные импульсы каждые 20 мс. Библиотека Arduino Servo, которую мы будем использовать для управления серводвигателями, позаботится об этом.
Чтобы лучше понять, как управлять серводвигателями, изучим графики, приведеые на рис. 4.10.
В примерах, изображенных на рис. 4.1 0, импульс подается каждые 20 мс. Длительность импульса возрастает от 1 до 2 мс, при этом угол поворота серводвигателя (показанный справа от графика импульсов) увеличивается от 0 до 180 °.
- 100 -
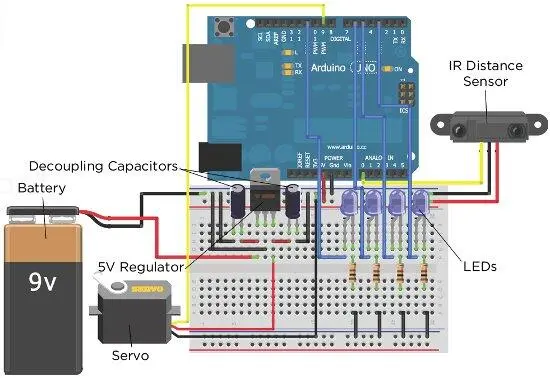
Рис. 4.10. Временные диаграммы управления серводвигателем
Как упоминалось ранее, для работы серводвигателя требуется ток, больший, чем выдает встроенный в Arduino блок питания. Однако большинство серводвигателей работает от напряжения 5 В, а не 9 или 12 В как двигатели постоянного тока. Несмотря на это, необходим отдельный блок питания серводвигателя.
Мы рассмотрим, как с помощью источника 9 В и стабилизатора напряжения получить напряжение 5 В для питания сервопривода. Интегральный стабилизатор напряжения - чрезвычайно простое устройство, у которого обычно три контакта:
• вход;
• выход;
• заземление.
Заземляющий вывод соединен как с землей входного, так и с землей выходного напряжения. Для работы стабилизатора входное напряжение должно быть выше, чем выходное, причем величина выходного напряжения фиксирована в зависимости от типа стабилизатора.
Падение напряжения приводит к нагреву, поэтому необходимо позаботиться о теплоотводе (например, алюминиевом радиаторе). Для наших экспериментов возьмем 5-вольтовый стабилизатор напряжения L4940V5, который способен выдавать ток до 1,5 А. Схема включения стабилизатора приведена на рис. 4.11.101
Рис. 4.11. Схема включения стабилизатора напряжения
Рис. 4.12. Схема подключения сервопривода
Потенциометр
- 102 -
Обратите внимание на конденсаторы на входе и выходе стабилизатора, они устраняют пульсации напряжения. Схема и номиналы конденсаторов подойдут для большинства типов стабилизаторов. Имейте в виду, что выход стабилизатора не нужно соединять с шиной 5 В платы Arduino. Соединить следует только шины земли стабилизатора и платы Arduino.
Пришло время подсоединить сервопривод. Сверяясь с монтажной схемой, подсоедините потенциометр к аналоговому входу A0, сигнальный вход сервопривода к цифровому входу 9 платы Arduino, убедитесь, что стабилизатор выдает напряжение 5 В. При соединении элементов обратите внимание на правильность подключения контактов стабилизатора и полярность включения конденсаторов (рис. 4.12).
Соединив все элементы, можно перейти к следующему разделу, чтобы узнать, как программировать контроллер сервопривода.
Разберемся, почему серводвигателю нужен внешний источник, если он работает, как и плата Arduino, от напряжения 5 В. При питании Arduino от USB для самой платы Arduino и подключенных к ней устройств максимально возможный ток равен 500 мА. В неподвижном положении сервоприводы потребляют малый ток. Но при выполнении команд сервоприводы потребляют ток в несколько сотен миллиампер, что приводит к скачкам напряжения. Кроме того, при недостаточном напряжении питания вал сервопривода перемещается неустойчиво. Поэтому для сервопривода необходим отдельный источник питания.
4.12. Контроллер серводвигателя
В Arduino IDE предусмотрена библиотека Servo для упрощения управления сервоприводами. Чтобы работать с библиотекой, необходимо подключить ее к нашей программе. Затем следует прикрепить объект Servo к определенному выводу Arduino и задать угол вращения. Обо всем остальном позаботится библиотека. Самый простой способ проверить функционирование сервопривода - управление позицией вала с помощью потенциометра. Значение 0 потенциометра соответствует повороту сервопривода на 0°, значение 1023 - повороту на 180°. Загрузите код, приведенный в листинге 4.6, в плату Arduino, чтобы проверить все в действии.
Листинг 4.6. Управление положением серводигателя с помощью потенциомера - servp.ino
// Управление положением серводвигателя с помощью потенциометра
#include
const int SERV0=9; // Вывод 9 для подключения сигнального провода сервопривода
const int POT=0;// Подключение потенциометра к аналоговому входу A0
Servo myServo;
int val = 0;// Переменная для чтения показаний потенциометра
void setup()
{
myServo.attach(SERV0);
}
- 103 -
void loop()
{
val = analogRead(POT);// Чтение данных потенциометра
val = map(val, 0, 1023, 0, 179); // Преобразование к нужному диапазону
myServo.write(val);// Установить положение сервопривода
delay(15);
}
Оператор include, указанный в начале программы, добавляет функционал библиотеки Servo. Оператор Servo myServo создает объект сервопривода с именем myservo.
В том месте программы, где требуется действие с сервоприводом, будет ссылка на объект myServo. В функции setup() вы инициализируете сервопривод, присоединяя его к контакту 9 Arduino. Можно подсоединить к Arduino несколько сервоприводов, создав несколько объектов Servo и назначив каждому свой контакт Arduino.
В цикле loop() считывается текущее значение потенциометра, масштабируется до диапазона значений сервопривода и формируется импульс для установки вала сервопривода в соответствующую позицию. Задержка на 15 мс гарантирует, что вал сервопривода фиксируется, прежде чем поступит новая команда.
4.1З. Создание радиального датчика расстояния
В завершение этой главы применим знания, полученные ранее, для создания дальномера. Система состоит из инфракрасного (ИК) датчика расстояния, установленного на серводвигателе, и четырех светодиодов. Четыре позиции вала серводвигателя панорамируют датчик по периметру комнаты, что позволяет примерно определить расстояние до объектов в каждой из четырех областей. Яркость четырех светодиодов меняется в зависимости от расстояния до объекта в каждой области.
Так как инфракрасный свет является частью электромагнитного спектра, невидимой для человеческого глаза, подобная система может использоваться для создания "ночного видения". ИК-датчик расстояния работает следующим образом. Излучение ИК-светодиода воспринимается фотоприемником, который расположен рядом со светодиодом. Таким образом определяется расстояние до объекта, которое преобразуется в аналоговое напряжение и далее анализируется с помощью микроконтроллера. Даже если в комнате темно и расстояние до объекта неизвестно, дальномер позволит его узнать, потому что он работает в диапазоне, невидимом для человеческого глаза.
Читать дальшеИнтервал:
Закладка: