Коллектив Авторов - Цифровой журнал «Компьютерра» № 159 (full)

- Название:Цифровой журнал «Компьютерра» № 159 (full)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Коллектив Авторов - Цифровой журнал «Компьютерра» № 159 (full) краткое содержание
Спор информированных с дезинформированными: как найти оптимальное решение? Автор: Дмитрий Шабанов
Hectic Life Автор: Сергей Голубицкий
Овраг, скрытый от ветра Автор: Михаил Ваннах
Долгое возвращение домой Автор: Сергей Голубицкий
На звёздах солнечного типа происходят сверхмощные вспышки. Вдруг бабахнет? Автор: Дмитрий Вибе
Об Алёне из Эволвы и пальцевом вводе косинуса Автор: Сергей Голубицкий
Пятьсот миллионов мандаринов Автор: Василий Щепетнёв
Ахиллесова пята IT Автор: Сергей Голубицкий
IT-рынокСемь громких рекламных войн между ИТ-компаниями Автор: Юрий Ильин
Персональный компьютер будет стоить меньше 100 долларов и уместится в кармане? Автор: Андрей Письменный
Автомобильный рынок’2030: железо от «Тойоты», ОС Android, софт из облака и антивирус Касперского? Автор: Денис Викторов
Московская Биржа проводит IPO: почему в этом нужно участвовать вам? Автор: Евгений Золотов
Большая проблема Big data в России Автор: Денис Викторов
Youtube и его партнёры: видео «для интернета» становятся отраслью Автор: Юрий Ильин
Золотая жила, которую нашёл Twitter: кто покупает ваши 140 знаков Автор: Олег Парамонов
Чего ждать от Apple в 2013 году: MacBook Air на ARM, приложения Apple TV, новые iPhone и iPad Автор: Андрей Письменный
Бизнес в социальных медиа: о средствах коммуникации Автор: Юрий Ильин
Тагир Яппаров (АйТи): О «политической воле» и ситуации с госпроектами на рынке ИТ Автор: Тагир Яппаров (АйТи)
jOBS: фильм, которого могло не быть Автор: Евгений Золотов
Dell выкупит все свои ценные бумаги у акционеров Автор: Юрий Ильин
Алекс Экслер: Litres шантажирует разработчиков программ-ридеров Автор: Алекс Экслер (www.exler.ru)
Марк Андриссен пророчит смерть традиционному ритейлу. Не рановато ли? Автор: Денис Викторов
Руслан Тугушев, Boomstarter: «Деньги перетекают к успешным проектам» Автор: Юрий Ильин
Как ломали Нью-Йорк Таймс (и почему не работают антивирусы)? Автор: Евгений Золотов
Угрозы, с которыми столкнутся приставки следующего поколения Автор: Михаил Карпов
ПромзонаInstaprint: специальный интернет-принтер для пользователей Instagram Автор: Николай Маслухин
Проект Google Houses: городские скворечники в виде меток Google Maps Автор: Николай Маслухин
Смартфон как внешняя мышка для ноутбука Автор: Николай Маслухин
Тарелка со встроенным доком под смартфон Автор: Николай Маслухин
MobileОт мошенников VAS не защитит даже ФАС Автор: Максим Букин
Опсосов в России всё меньше, а проникновение сотовой связи — 161 процент Автор: Максим Букин
Роуминг отменят в 2013 году Автор: Максим Букин
ТехнологииРой летающих роботов: как устроены жутковатые аппараты из лаборатории GRASP Автор: Олег Парамонов
Новая космическая гонка: современные космические программы Китая и Индии Автор: Андрей Васильков
Наземные боевые лазеры: от химии к волоконной оптике Автор: Андрей Васильков
Бум домашних роботов начался, но будет не таким, как ждали Автор: Андрей Письменный
Что будет после мультитача: три интерфейса будущего Автор: Олег Парамонов
ИнновацииПочему бизнес-ангелы в России все еще не инвесторы, а мифические существа Автор: Валентина Славина, президент НП «Бизнес-ангелы Урала»
Солнечная энергетика на наноантеннах стала ближе Автор: Компьюлента
Социальные стартапы: на ЖКХ и дорогах бизнеса не сделать Автор: Максим Каманин, основатель Displair
Пылесос для стартапов, или Как бы не сдуло всех инноваторов из России — в США Автор: Денис Викторов
Как привлекать инвестиции в стартап Автор: Лев Самсонов, директор по развитию Global TechInnovations
Цифровой журнал «Компьютерра» № 159 (full) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В отличие от информации о проектах Boston Dynamics, ведущихся на военные деньги и с военной же скрытностью, найти информацию о роящихся квадролётах не так уж трудно. Все необходимые сведения имеются в многочисленных научных работах, которые публикуют их создатели из лаборатории робототехники, автоматизации, очувствления и восприятияуниверситета Пенсильвании (краткое название лаборатории — GRASP). Некоторые дополнительные подробности можно почерпнуть из записей их публичных выступлений и интервью.
При ближайшем рассмотрении оказывается, что миниатюрные квадролёты GRASP представляют собой весьма интересные устройства даже в том случае, если не принимать во внимание их коллективное поведение.
Весь механизм целиком, включая батарею и электронику, весит всего 73 грамма, то есть раза в полтора-два меньше, чем средний смартфон. При этом он умещается на ладони: диаметр каждого из четырёх пропеллеров составляет 8 сантиметров, а в сумме вся конструкция имеет в поперечнике 21 сантиметр.
Хранение энергии — едва ли не главная проблема, с которой сталкиваются создатели электрических квадролётов. Хотя на аккумуляторы, как правило, приходится до половины веса летательного аппарата, это не помогает. Даже с такими большими батареями небольшие квадролёты редко держатся в воздухе дольше пяти минут.
Конструкторы миниатюрных квадролётов GRASP добились в этой области относительно неплохих показателей. Источником энергии служит литий-полимерный аккумулятор ёмкостью 400 мА*ч, весящий 23 грамма. За счёт невысокого энергопотребления время автономной работы аппарата удалось довести до 11 минут.
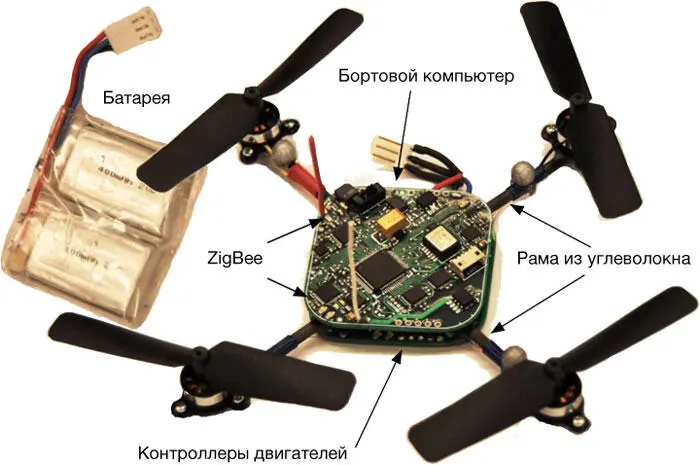
Бортовой компьютер основан на процессоре ARM Cortex-M3 с тактовой частотой 700 МГц. Он обрабатывает информацию, поступающую с датчиков: трёхосного акселерометра, трёхосного же магентометра, барометра для измерения высоты и двух гироскопов, один из которых, двухосный, измеряет тангаж и крен, а другой, одноосный, измеряет рыскание устройства.
Нетрудно заметить, что все эти датчики сообщают лишь о перемещениях того квадролёта, на котором они установлены. Ни один из них не позволяет узнать, что происходит вокруг. Для этого необходима видеокамера или хотя бы дальномер, но их нет.
В GRASP имеются квадрокоптеры, снабжённые в дополнение к прочим датчикам ещё и камерой Kinect. Они способны самостоятельно построить трёхмерную картину своего окружения, но по очевидным причинам гораздо крупнее, чем те летающие роботы, о которых идёт речь в этой статье. Поскольку исследователей интересовала максимальная миниатюрность, им пришлось пойти на компромисс.
Миниатюрные квадролёты GRASP ориентируются в пространстве с помощью внешней системы захвата движения компании Vicon, которая установлена в лаборатории. Данные, которые она собирает, подвергаются первичной обработке на стационарной рабочей станции, а затем передаются квадролётам по беспроводному протоколу ZigBee. Обмен информацией между рабочей станцией и каждым роботом происходит сто раз в секунду.

Погоня за миниатюрностью имеет объяснение. Миниатюрные квадролёты отличаются почти сверхъестественной маневренностью. Именно она делает их движения настолько странными и неестественными. Аппарат совершает 360-градусный кувырок быстрее, чем за полсекунды, а за секунду он способен «прыгнуть» в сторону на ширину своего корпуса или совершить больше пяти оборотов вокруг одной из осей.
Видео, которые публиковали исследователи, наглядно показывают, что даёт такая маневренность. Стремительные прыжки и мгновенные изменения ориентации устройства позволяют выполнять трюки, которые были бы невозможными в другом случае — например, преодолевать узкие проёмы, на долю секунды наклонившись на 90 градусов.
Побочный эффект миниатюрности — исключительно низкая грузоподъёмность. Это она подтолкнула исследователей к экспериментам с коллективами роботов. Да, один маленький квадролёт слаб, но достаточно большая группа роботов справится с чем угодно. Когда профессор Виджай Кумар из лаборатории GRASP выступална конференции TED, он проиллюстрировал эту идею видеороликом, показывающим муравьёв, которые совместными усилиями несут в муравейник груз, неподъёмный для любого из них по отдельности.

На TED Кумар рассказал, что для того, чтобы организовать совместную работу большого коллектива летающих роботов, следует руководствоваться тремя принципами. Во-первых, управление должно быть децентрализованным. Введение иерархии непозволительно усложнит и замедлит процесс. Подобно муравьям, роботам следует научиться обходиться без лидера. Во-вторых, роботы должны быть взаимозаменяемы и неотличимы друг от друга (принцип «анонимности»). В-третьих, они должны использовать лишь информацию, доступную локально.
Слаженное групповое поведение, которое на первый взгляд кажется невозможным без строгой организации, в действительности может быть полностью децентрализованным и неуправляемым. Знаменитое приложение Boids, разработанное специалистом по компьютерной графике Крейгом Рейнольдсом в 1986 году, демонстрирует это как нельзя лучше.
Каждый объект в Boids выбирает свой путь на основании трёх простых правил. Первое правило: держать дистанцию между собой и другим объектам. Второе правило: двигаться в том направлении, где находится ближайший объект. Третье правило: стремиться к центру массы группы ближайших объектов.
Результат: объекты на экране Boids самоорганизуются в подвижные группы, движущиеся поразительно похоже на настоящие стаи птиц или косяки рыб. Чуть доработанные алгоритмы Boids часто используют при изготовлении спецэффектов в кино, когда нужно изобразить правдоподобное поведение толпы людей.
Поскольку летающим роботам незачем имитировать стаи птиц, они могут обойтись ещё более простым алгоритмом. Чтобы не сталкиваться в полёте, они должны всего лишь поддерживать стабильную дистанцию между собой и другими роботами. Каждый из них в этом случае может выполнять свою задачу независимо и менять траекторию лишь при возникновении угрозы столкновения — маневренности как раз хватит.
Это, впрочем, теория. В GRASP ведутся исследования в области децентрализованного управления коллективами роботов (как летающих, так и наземных), однако миниатюрные квадролёты с видео используют принципы, перечисленные Виджеем Кумаром, далеко не в полной мере.
Читать дальшеИнтервал:
Закладка: