Наик Дайлип - Серверные технологии хранения данных в среде Windows® 2000 Windows® Server 2003

- Название:Серверные технологии хранения данных в среде Windows® 2000 Windows® Server 2003
- Автор:
- Жанр:
- Издательство:Издательский дом «Вильямс»
- Год:2005
- Город:Москва
- ISBN:5–8459–0746–2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Наик Дайлип - Серверные технологии хранения данных в среде Windows® 2000 Windows® Server 2003 краткое содержание
Книга предназначена для читателей, хорошо знакомых с компьютерными системами и индустрией информационных технологий и желающих расширить познания в области систем хранения данных и архитектуры Windows NT, непосредственно связанной с подобными системами. В книге описываются корпоративные системы хранения данных, в то время как системам потребительского уровня уделяется меньше внимания. В этом издании сделана попытка поддержать интересы специалистов по программному обеспечению, мало знакомых с технологиями хранения данных, и профессионалов в области систем хранения данных, которые стремятся получить дополнительные знания по архитектуре обработки и хранения данных в Windows NT. В то же время книга будет интересна всем читателям, намеревающимся получить исчерпывающие сведения по описанной теме.
Серверные технологии хранения данных в среде Windows® 2000 Windows® Server 2003 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
• блокирование и разблокирование буфера приложения;
• связывание заблокированного буфера с виртуальным адресом, который доступен из контекста любого потока;
• сбор информации, необходимой для выполнения операции ввода-вывода с прямым доступом к памяти в буфер или из него, который в действительности представляет собой последовательность потенциально несоседних физических страниц памяти.
Прямой ввод-вывод чаще всего используется в драйверах ввода-вывода, например драйверах управления дисками и приводами на магнитной ленте.
Этот тип ввода-вывода позволяет избавиться от генерирования дополнительных данных, что свойственно для буферизированного ввода-вывода (операций копирования данных и выделение/освобождение буфера) и прямого ввода-вывода (создания и уничтожения списка дескрипторов памяти), но за это приходится расплачиваться ограниченностью применения данного типа ввода-вывода. При небуферизированном вводе-выводе драйверу непосредственно передается адрес буфера запросившего приложения. Внимательный читатель быстро догадается, что, поскольку виртуальный адрес имеет смысл только в контексте определенного процесса или потока, драйвер должен вызываться в контексте запросившего приложения. Более того, драйвер должен выполнить операцию в этом же контексте (т.е. драйвер не может поместить запрос в очереди для последующего выполнения в произвольном контексте).
Это ограничение определяет ситуации использования данного метода ввода-вывода, который не применяется большинством драйверов, исключение составляют, например, драйверы файловой системы. Дело в том, что последние всегда вызываются в контексте процесса, который запрашивает операцию ввода-вывода. Кроме того, небуферизированный ввод-вывод поддерживает копирование между кэшем и буферами данных, так как управлять буферами (связывание адресов) не требуется.
Может сложиться неверное впечатление, что драйвер должен выбрать один из описанных способов вводагвывода и использовать только его. Драйвер, который выполняет операции управления вводом-выводом (IOCTL), может использовать один метод ввода-вывода для обработки обычных пакетов IRP и совершенно другой метод для операций управления вводом-выводом, которые определяются частным образом между драйвером и соответствующим приложением. Конечно, даже драйвер на нижних уровнях стека драйверов, который не имеет информации о контексте выполнения, не обязательно использует небуферизированный ввод-вывод в частных операциях управления вводом-выводом.
Поскольку здесь затронута тема частного управления вводом-выводом, стоит упомянуть, что компания Microsoft настойчиво советует не применять такой способ управления, особенно при наличии более приемлемой альтернативы. Основная проблема частного управления вводом-выводом заключается в сложности проверки «жизнеспособности» кода драйвера методом намеренной передачи некорректных буферов процедуре управления вводом-выводом, что делается для проверки работоспособности драйвера. Для передачи некорректного буфера необходимо иметь информацию о правильном размере буфера, выравнивании и граничных условиях, которые предполагаются в коде управления вводом-выводом, а для частных операций управления вводом- выводом эти параметры каждый раз имеют другие значения.
1.7 Иерархия драйверов систем хранения и типы драйверов
Как описывалось в предыдущем разделе, Windows NT основана на архитектуре, в которой драйверы формируют многоуровневую иерархию. Преимущество такой архитектуры состоит в расширяемости архитектуры и возможности добавления новых драйверов на любой уровень иерархической структуры. Таким образом, благодаря поуровневому размещению драйверов можно реализовать различные функциональные возможности. В контексте выполняемого модуля Windows NT все драйверы имеют аналогичную структуру, поэтому функции драйвера используются схожим образом вне зависимости от его типа.
В этом разделе представлен обзор стека драйверов устройств хранения Windows NT. Обратите внимание, что речь идет только о базовых, а не обо всех драйверах, связанных с подсистемой хранения данных. Например, драйверы, связанные со службами удаленного хранения (RSS), рассматриваются в главе 7.
На рис. 1.5 демонстрируется стек драйверов подсистемы хранения данных Windows NT. Обратите внимание: здесь представлена многоуровневая архитектура драйверов, однако в зависимости от ситуации те или иные уровни приобретают более важное значение. Ниже приведены примеры подобных ситуаций.
При вводе-выводе данных на физический диск, подключенный через интерфейс IDE или SCSI, необходимы уровни класса и порта, а также уровни файловой системы и управления томами. Все эти уровни рассматриваются далее в главе.
При вводе-выводе данных посредством накопителя на магнитной ленте уровни управления томами и файловой системы не требуются.
В следующих подразделах рассматриваются драйверы шины, порта, класса, управления томами, файловой системы и фильтрации, представленные на рис. 1.5.
Драйвер шины Windows NT предоставляет функции шины другим драйверам. Термин шина используется в универсальном смысле, обозначая любое виртуальное или физическое устройство, к которому подключаются другие устройства. Драйверы шины необходимы для поддержки процедур перебора, которые вызываются диспетчером Plug and Play для перечисления устройств, подключенных к шине. Кроме того, от драйверов шины требуется предоставление кода обработки РпР, а также пакетов IRP для управления энергопитанием. Компания Microsoft предоставляет драйверы ввода-вывода для всех физических шин персональных компьютеров (например, SCSI, PCI, 1394, USB), хотя независимые поставщики оборудования также могут по мере необходимости предоставлять собственные драйверы шин. Драйвер шины создает объект физического устройства (physical device object – PDO) для каждого устройства, указанного процедурой перечисления устройств.
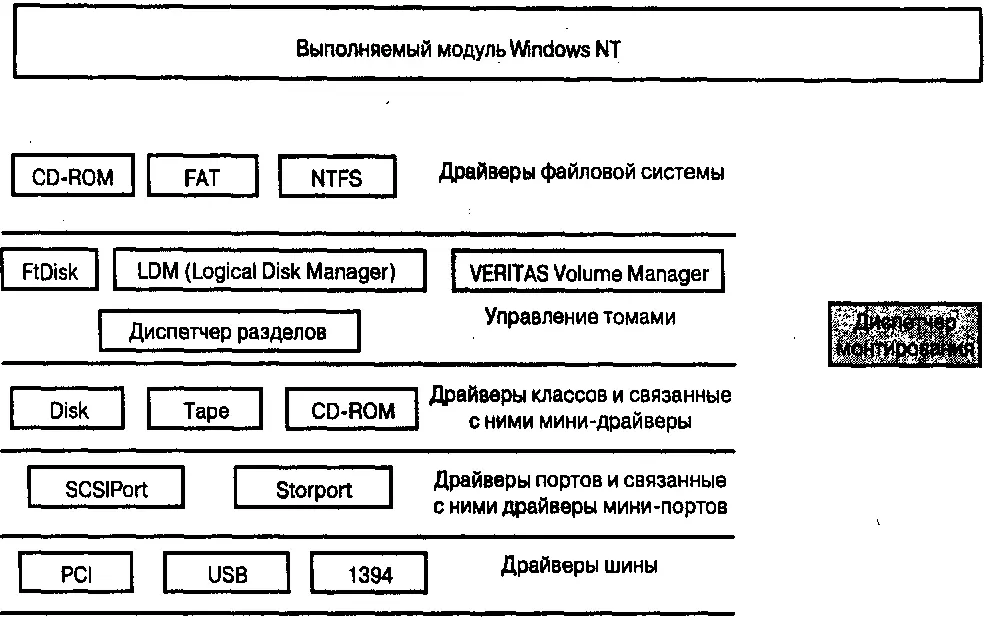
Рис. 1.5. Стек драйверов хранения Windows NT
Драйвер порта реализует специфичные для устройства функциональные возможности и изолирует драйвер класса от влияния особенностей аппаратного обеспечения. Драйвер порта должен реализовать набор указанных функций для драйвера класса и может реализовать дополнительные возможности. Драйвер порта получает пакеты IRP и передает блоки запросов SCSI с встроенными блоками дескрипторов команд драйверу мини-порта, который динамически подключается к драйверу порта. Драйверы мини-портов не создают объектов устройств, а используют созданные драйверами порта. Как отмечалось в разделе 1.4.2, драйверы порта создают объект физического устройства, необходимый для взаимодействия с устройством.
Читать дальшеИнтервал:
Закладка: