Андрей Робачевский - Операционная система UNIX

- Название:Операционная система UNIX
- Автор:
- Жанр:
- Издательство:BHV - Санкт-Петербург
- Год:1997
- Город:Санкт-Петербург
- ISBN:5-7791-0057-8
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Андрей Робачевский - Операционная система UNIX краткое содержание
Книга посвящена семейству операционных систем UNIX и содержит информацию о принципах организации, идеологии и архитектуре, объединяющих различные версии этой операционной системы.
В книге рассматриваются: архитектура ядра UNIX (подсистемы ввода/вывода, управления памятью и процессами, а также файловая подсистема), программный интерфейс UNIX (системные вызовы и основные библиотечные функции), пользовательская среда (командный интерпретатор shell, основные команды и утилиты) и сетевая поддержка в UNIX (протоколов семейства TCP/IP, архитектура сетевой подсистемы, программные интерфейсы сокетов и TLI).
Для широкого круга пользователей
Операционная система UNIX - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Рассмотрим пример потока, модули 1 и 3 которого поддерживают управление потоком данных, а модуль 2 — нет. Другими словами, модуль 2 не имеет процедуры xx service(). Когда сообщение достигает модуля 3, вызывается его функция xx put(). После необходимой обработки сообщения, оно помещается в очередь модуля 3 с помощью функции putq(9F) . Если при этом число сообщений в очереди превышает верхнюю ватерлинию, putq(9F) устанавливает специальный флаг, сигнализирующий о том, что очередь переполнена:
mod1put(queue_t* q, mblk_t* mp) {
/* Необходимая обработка сообщения */
...
putq(q, mp);
}
Через некоторое время ядро автоматически запускает процедуру xx service()модуля 3. Для каждого сообщения очереди xxput()вызывает функцию canput(9F) , которая проверяет заполненность очереди следующего по потоку модуля. Функция canput(9F) имеет вид:
#include
int canput(queue_t* q);
Заметим, что canput(9F) проверяет заполненность очереди следующего модуля, реализующего механизм управления передачей данных, т.е. производящего обработку очереди с помощью процедуры xx service(). В противном случае, как уже говорилось, очередь модуля не принимает участия в передаче данных. В нашем примере, canput(9F) проверит заполненность очереди записи модуля 1. Функция возвращает истинное значение, если очередь может принять сообщение, и ложное — в противном случае. В зависимости от результата проверки процедура xx service()либо передаст сообщение следующему модулю (в нашем примере — модулю 2, который после необходимой обработки сразу же передаст его модулю 1), либо вернет сообщение обратно в очередь, если следующая очередь переполнена.
Описанная схема показана на рис. 5.20. Ниже приведен скелет процедуры xx service()модуля 3, иллюстрирующий описанный алгоритм передачи сообщений с использованием механизма управления передачей данных.
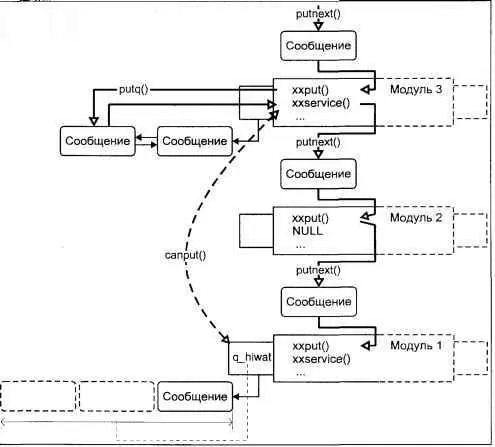
Рис. 5.20. Управление потоком данных
mod1service(queue_t *q) {
mblk_t* mp;
while ((mp = getq(q)) != NULL) {
if (canput(q->q_next))
putnext(q, mp);
else {
putbq(q, mp);
break;
}
}
В этом примере функция getq(9F) используется для извлечения следующего сообщения из очереди, а функция putbq(9F) — для помещения сообщения в начало очереди. Если модуль 1 блокирует передачу, т.е. canput(9F) вернет "ложно", процедура xx service()завершает свою работу, и сообщения начинают буферизоваться в очереди модуля 3. При этом очередь временно исключается из списка очередей, ожидающих обработки, и процедура xx service()для нее вызываться не будет. Данная ситуация продлится до тех пор, пока число сообщений очереди записи модуля 1 не станет меньше нижней ватерлинии.
Пока существует возникшая блокировка передачи, затор будет постепенно распространяться вверх по потоку, последовательно заполняя очереди модулей, пока, в конечном итоге, не достигнет головного модуля. Поскольку передачу данных в головной модуль (вниз по потоку) инициирует приложение, попытка передать данные в переполненный головной модуль вызовет блокирование процесса [61] Это единственная ситуация, в которой возможно блокирование процесса.
и переход его в состояние сна.
В конечном итоге, модуль 1 обработает сообщения своей очереди, и их число станет меньше нижней ватерлинии. Как только очередь модуля 1 станет готовой к приему новых сообщений, планировщик STREAMS автоматически вызовет процедуры xx service()для модулей, ожидавших освобождения очереди модуля в нашем примере — для модуля 3.
Управление передачей данных в потоке требует согласованной работы всех модулей. Например, если процедура xx put()буферизует сообщения для последующей обработки xx service(), такой алгоритм должен выполняться для всех сообщений. [62] Более точно — для всех сообщений с данным приоритетом.
В противном случае, это может привести к нарушению порядка сообщений, и как следствие, к потере данных.
Когда запускается процедура xx service(), она должна обработать все сообщения очереди. "Уважительной" причиной прекращения обработки является переполнение очереди следующего по потоку модуля. В противном случае нарушается механизм управления передачей, и очередь может навсегда лишиться обработки.
Драйвер
Драйверы и модули очень похожи, они используют одинаковые структуры данных ( streamtab, qinit, module_info) и одинаковый интерфейс ( xx open(), xx put(), xx service()и xx close()). Однако между драйверами и модулями существуют различия.
Во-первых, только драйверы могут непосредственно взаимодействовать с аппаратурой и отвечать за обработку аппаратных прерываний. Поэтому драйвер должен зарегистрировать в ядре соответствующий обработчик прерываний. Аппаратура обычно генерирует прерывания при получении данных. В ответ на это драйвер копирует данные от устройства, формирует сообщение и передает его вверх по потоку.
Во-вторых, к драйверу может быть подключено несколько потоков. Как уже обсуждалось, на мультиплексировании потоков построены многие подсистемы ядра, например, поддержка сетевых протоколов. В качестве мультиплексора может выступать только драйвер. Несмотря на то что драйвер в этом случае не является оконечным модулем (см., например, рис. 5.15), размещение драйверов существенным образом отличается от встраивания модулей.
Наконец, процесс инициализации драйверов и модулей различен. Функция xx open()драйвера вызывается при открытии потока, в то время как инициализация модуля происходит при встраивании.
Головной модуль
Обработку системных вызовов процессов осуществляет головной модуль. Головной модуль потока является единственным местом, где возможно блокирование обработки и, соответственно, процесса, в контексте которого осуществляется операция ввода/вывода. Головной модуль является внешним интерфейсом потока, и хотя его структура похожа на структуру обычного модуля, функции обработки здесь обеспечиваются самой подсистемой STREAMS. В отличие от точек входа в модуль или драйвер потока, реализующих специфическую для данного устройства обработку, функции головного модуля выполняют ряд общих для всех потоков задач, включающих:
□ Трансляцию данных, передаваемых процессом с помощью системных вызовов, в сообщения и передачу их вниз по потоку.
□ Сообщение об ошибках и отправление сигналов процессам, связанным с потоком.
□ Распаковку сообщений, переданных вверх по потоку, и копирование данных в пространство ядра или задачи.
Читать дальшеИнтервал:
Закладка: