Андрей Робачевский - Операционная система UNIX

- Название:Операционная система UNIX
- Автор:
- Жанр:
- Издательство:BHV - Санкт-Петербург
- Год:1997
- Город:Санкт-Петербург
- ISBN:5-7791-0057-8
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Андрей Робачевский - Операционная система UNIX краткое содержание
Книга посвящена семейству операционных систем UNIX и содержит информацию о принципах организации, идеологии и архитектуре, объединяющих различные версии этой операционной системы.
В книге рассматриваются: архитектура ядра UNIX (подсистемы ввода/вывода, управления памятью и процессами, а также файловая подсистема), программный интерфейс UNIX (системные вызовы и основные библиотечные функции), пользовательская среда (командный интерпретатор shell, основные команды и утилиты) и сетевая поддержка в UNIX (протоколов семейства TCP/IP, архитектура сетевой подсистемы, программные интерфейсы сокетов и TLI).
Для широкого круга пользователей
Операционная система UNIX - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
ioctl(fd, I_STR, (struct strioctl*)arg);
struct strioctl {
int ic_cmd;
int ic_timout;
int ic_len;
char* ic_dp;
}
где ic_cmd— фактическая команда,
ic_timeout— число секунд, которое головной модуль будет ожидать подтверждения запроса, после он вернет процессу ошибку тайм-аута ETIME,
ic_len— размер блока параметров команды,
ic_dp— указатель на блок параметров.
Если головной модуль не может обработать команду, он формирует сообщение M_IOCTLи копирует в него команду ( ic_cmd) и блок параметров ( ic_len, ic_dp). После этого сообщение направляется вниз по потоку. Когда модуль получает сообщение, оно содержит все необходимые данные для обработки команды. Если команда предполагает передачу информации процессу, модуль записывает необходимые данные в то же сообщение, изменяет его тип на M_IOCACKи отправляет его вверх по потоку. В свою очередь головной модуль получает сообщение и производит передачу параметров процессу.
Другой подход получил название прозрачных команд ioctl(2) (transparent ioctl). Он позволяет использовать стандартные команды ioctl(2) , решая при этом проблему копирования данных. Когда процесс выполняет вызов ioctl(2) , головной модуль формирует сообщение M_IOCTLи копирует в него параметры вызова — commandи arg. Обычно параметр argявляется указателем на блок параметров, размер и содержимое которого известны только модулю (или драйверу), отвечающему за обработку данной команды. Поэтому головной модуль просто копирует этот указатель, не интерпретируя его и тем более не копируя в сообщение сам блок параметров. Сообщение передается вниз по потоку.
Когда модуль получает сообщение, в ответ он отправляет сообщение M_COPYIN, содержащее размер и расположение данных [65] Расположение данных уже содержится в параметре arg , который передается обратно в сообщении M_COPYIN .
, необходимых для выполнения команды. Головной модуль пробуждает процесс, вызвавший ioctl(2) , для копирования параметров. Поскольку последующие операции выполняются в контексте процесса, никаких проблем доступа к его адресному пространству не возникает. Головной модуль создает сообщение M_IOCARGS,копирует в него параметры команды и направляет сообщение вниз по потоку. После этого процесс опять переходит в состояние сна.
Когда модуль получает сообщение M_IOCARGS, он интерпретирует содержащиеся в нем параметры и выполняет команду. В некоторых случаях для получения всех параметров, необходимых для выполнения команды, может потребоваться дополнительный обмен сообщениями M_COPYINи M_IOCARGS. Такая ситуация может возникнуть, например, если один из параметров являлся указателем на структуру данных. Для получения копии структуры модулю потребуется дополнительная итерация.
После получения всех необходимых данных и выполнения команды в случае, если результат должен быть передан процессу, модуль формирует одно или несколько сообщений M_COPYOUT, помещая в них требуемые данные, и направляет их вверх по потоку. Головной модуль пробуждает процесс, передавая ему результаты выполнения команды. Когда все результаты переданы процессу, модуль посылает подтверждение M_IOCACK, в результате которого головной модуль пробуждает процесс в последний раз, завершая тем самым выполнение вызова ioctl(2) .
Мультиплексирование
Подсистема STREAMS обеспечивает возможность мультиплексирования потоков с помощью мультиплексора , который может быть реализован только драйвером STREAMS. Различают три типа мультиплексоров — верхний, нижний и гибридный. Верхний мультиплексор , называемый также мультиплексором N:1, обеспечивает подключение нескольких каналов вверх по потоку к одному каналу вниз по потоку. Нижний мультиплексор , называемый также мультиплексором 1:M, обеспечивает подключение нескольких каналов вниз по потоку к одному каналу вверх по потоку. Гибридный мультиплексор , как следует из названия, позволяет мультиплексировать несколько каналов вверх по потоку с несколькими каналами вниз по потоку.
Заметим, что подсистема STREAMS обеспечивает возможность мультиплексирования, но за идентификацию различных каналов и маршрутизацию данных между ними отвечает сам мультиплексор.
Мультиплексирование каналов вверх по потоку осуществляется в результате открытия одного и того же драйвера с различными младшими номерами. Верхний мультиплексор должен обеспечить возможность одновременной работы с устройством с использованием различных младших номеров. Если два процесса открывают поток, используя различные младшие номера, ядро создаст отдельный канал для каждого из них, каждый из них будет адресоваться отдельным vnode, и процедура xx open()драйвера будет вызвана дважды. Драйвер при этом будет обрабатывать две пары очередей, каждая из которых отвечает за отдельный поток. Когда данные поступают от устройства, драйвер должен принять решение, в какую очередь чтения их направить. Обычно такое решение делается на основании управляющей информации, содержащейся в полученных данных. На рис. 5.23 представлен вид верхнего мультиплексора с двумя подключенными потоками.
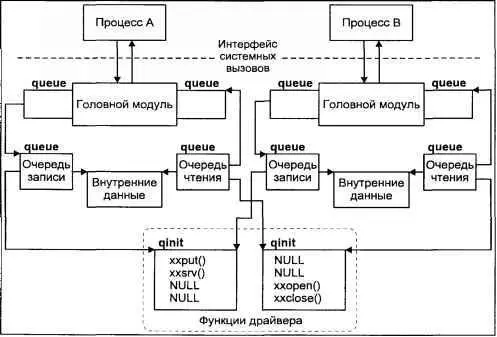
Рис. 5.23. Верхний мультиплексор
Нижний мультиплексор представляет собой драйвер псевдоустройства. Вместо работы с физическим устройством он взаимодействует с несколькими каналами вниз по потоку. Для этого нижний мультиплексор обеспечивает работу с еще одной парой очередей — нижними очередями чтения и записи. Структура streamtabнижнего мультиплексора адресует процедурный интерфейс работы с нижними очередями соответственно полями st_muxrinitи st_muxwinit.
Для работы с мультиплексированными потоками подсистема STREAMS поддерживает четыре команды ioctl(2) :
I_LINK |
Используется для объединения потоков. При этом файловый дескриптор указывает на поток, подключенный к мультиплексору. Второй файловый дескриптор, передаваемый в качестве аргумента команды, указывает на поток, который необходимо подключить ниже мультиплексора. |
I_PLINK |
Используется для потоков, которое сохраняется при закрытии файлового дескриптора. В остальном аналогично команде I_LINK. |
I_UNLINK, I_PUNLINK |
Используются для разъединения потоков, созданных командами I_LINKи I_PLINK. |
Создание мультиплексированного потока происходит в два этапа. Поясним этот процесс на примере создания стека протокола IP, поддерживающего работу как с адаптером Ethernet, так и с адаптером FDDI. Для этого необходимо объединить драйвер адаптера Ethernet, драйвер адаптера FDDI и драйвер IP, который является нижним мультиплексором. Процесс должен выполнить следующие действия:
Читать дальшеИнтервал:
Закладка: