Уильям Стивенс - UNIX: разработка сетевых приложений

- Название:UNIX: разработка сетевых приложений
- Автор:
- Жанр:
- Издательство:Питер
- Год:2007
- Город:Санкт-Петербург
- ISBN:5-94723-991-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Уильям Стивенс - UNIX: разработка сетевых приложений краткое содержание
Новое издание книги, посвященной созданию веб-серверов, клиент-серверных приложений или любого другого сетевого программного обеспечения в операционной системе UNIX, — классическое руководство по сетевым программным интерфейсам, в частности сокетам. Оно основано на трудах Уильяма Стивенса и полностью переработано и обновлено двумя ведущими экспертами по сетевому программированию. В книгу включено описание ключевых современных стандартов, реализаций и методов, она содержит большое количество иллюстрирующих примеров и может использоваться как учебник по программированию в сетях, так и в качестве справочника для опытных программистов.
UNIX: разработка сетевых приложений - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
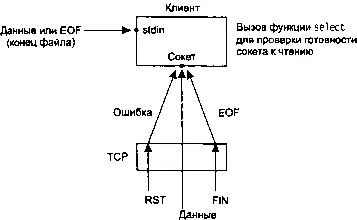
Рис. 6.7. Условия, обрабатываемые функцией select в вызове функции str_cli
Сокет обрабатывает три условия:
1. Если протокол TCP собеседника отправляет данные, сокет становится готовым для чтения, и функция readвозвращает положительное значение (то есть число байтов данных).
2. Если протокол TCP собеседника отправляет сегмент FIN (процесс завершается), сокет становится готовым для чтения, и функция readвозвращает нуль (признак конца файла).
3. Если TCP собеседника отправляет RST (узел вышел из строя и перезагрузился), сокет становится готовым для чтения, и функция readвозвращает -1, а переменная errnoсодержит код соответствующей ошибки.
В листинге 6.1 [1] Все исходные коды программ, опубликованные в этой книге, вы можете найти по адресу http://www.piter.com.
представлен исходный код этой версии функции.
Листинг 6.1. Реализация функции str_cli с использованием функции select (усовершенствованный вариант находится в листинге 6.2)
//select/strcliselect01.c
1 #include "unp.h"
2 void
3 str_cli(FILE *fp, int sockfd)
4 {
5 int maxfdp1;
6 fd_set rset;
7 char sendline[MAXLINE], recvline[MAXLINE];
8 FD_ZERO(&rset);
9 for (;;) {
10 FD_SET(fileno(fp), &rset);
11 FD_SET(sockfd, &rset);
12 maxfdp1 = max(fileno(fp), sockfd) + 1;
13 Select(maxfdp1, &rset, NULL, NULL, NULL);
14 if (FD_ISSET(sockfd, &rset)) { /* сокет готов для чтения */
15 if (Readline(sockfd, recvline, MAXLINE) == 0)
16 err_quit("str_cli: server terminated prematurely");
17 Fputs(recvline, stdout);
18 }
19 if (FD_ISSET(fileno(fp), &rset)) { /* входное устройство готово для
чтения */
20 if (Fgets(sendline, MAXLINE, fp) == NULL)
21 return; /* все сделано */
22 Writen(sockfd, sendline, strlen(sendline));
23 }
24 }
25 }
8-13 Нам нужен только один набор дескрипторов — для проверки готовности сокета для чтения. Этот набор дескрипторов инициализируется макросом FD_ZERO, после чего с помощью макроса FD_SETустанавливаются два бита: бит, соответствующий указателю файла fpстандартного потока ввода-вывода, и бит, соответствующий дескриптору сокета sockfd. Функция filenoпреобразует указатель файла стандартного потока ввода-вывода в соответствующий ему дескриптор. Функция select(а также poll) работает только с дескрипторами.
Функция selectвызывается после определения максимального из двух дескрипторов. В этом вызове указатель на набор дескрипторов для записи и указатель на набор дескрипторов с исключениями являются пустыми. Последний аргумент (ограничение по времени) также является пустым указателем, поскольку мы хотим, чтобы процесс был блокирован, пока не будут готовы данные для чтения.
14-18 Если по завершении функции selectсокет готов для чтения, отраженная строка считывается функцией readlineи выводится функцией fputs.
19-23 Если стандартный поток ввода готов для чтения, строка считывается функцией fgetsи записывается в сокет с помощью функции writen.
Обратите внимание, что используются те же четыре функции ввода-вывода, что и в листинге 5.4: fgets, writen, readlineи fputs, но порядок их следования внутри функции str_cliизменился. Раньше выполнение функции str_cliопределялось функцией fgets, а теперь ее место заняла select. С помощью всего нескольких дополнительных строк кода (сравните листинги 6.1 и 5.4) мы значительно увеличили устойчивость клиента.
6.5. Пакетный ввод
К сожалению, наша функция str_cliвсе еще не вполне корректна. Сначала вернемся к ее исходной версии, приведенной в листинге 5.4. Эта функция работает в режиме остановки и ожидания (stop-and-wait mode), что удобно для интерактивного использования: функция отправляет строку серверу и затем ждет его ответа. Время ожидания складывается из одного периода обращения (RTT) и времени обработки сервером (которое близко к нулю в случае простого эхо-сервера). Следовательно, мы можем предположить, сколько времени займет отражение данного числа строк, если мы знаем время обращения (RTT) между клиентом и сервером.
Измерить RTT позволяет утилита ping. Если мы измерим с ее помощью время обращения к connix.comс нашего узла solaris, то средний период RTT после 30 измерений будет равен 175 мс. В [111, с. 89] показано, что это справедливо для дейтаграммы IP длиной 84 байт. Если мы возьмем первые 2000 строк файла termcapSolaris 2.5, то итоговый размер файла будет равен 98 349 байт, то есть в среднем 49 байт на строку. Если мы добавим размеры заголовка IP (20 байт) и заголовка TCP (20 байт), то средний сегмент TCP будет составлять 89 байт, почти как размер пакета утилиты ping. Следовательно, мы можем предположить, что общее время составит около 350 с для 2000 строк (2000×0,175 с). Если мы запустим наш эхо-клиент TCP из главы 5, действительное время получится около 354 с, что очень близко к нашей оценке.
Если считать, что сеть между клиентом и сервером является двусторонним каналом, когда запросы идут от клиента серверу, а ответы в обратном направлении, то получится изображенный на рис. 6.8 режим остановки и ожидания.
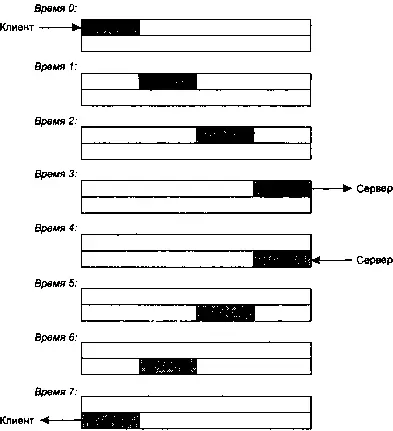
Рис. 6.8. Временная диаграмма режима остановки и ожидания: интерактивный ввод
Запрос отправляется клиентом в нулевой момент времени, и мы предполагаем, что время обращения RTT равно 8 условным единицам. Ответ, отправленный в момент времени 4, доходит до клиента в момент времени 7. Мы также считаем, что время обработки сервером нулевое и что размер запроса равен размеру ответа. Мы показываем только пакеты данных между клиентом и сервером, игнорируя подтверждения TCP, которые также передаются по сети.
Но поскольку между отправкой пакета и его приходом на другой конец канала существует задержка и канал является двусторонним, в этом примере мы используем только восьмую часть вместимости канала. Режим остановки и ожидания удобен для интерактивного ввода, но поскольку наш клиент считывает данные из стандартного потока ввода и записывает в стандартный поток вывода, а перенаправление ввода и вывода выполнить в интерпретаторе команд крайне просто, мы легко можем запустить наш клиент в пакетном режиме. Однако когда мы перенаправляем ввод и вывод, получающийся файл вывода всегда меньше файла ввода (а для эхо-сервера требуется их идентичность).
Чтобы понять происходящее, обратите внимание, что в пакетном режиме мы отправляем запросы так быстро, как их может принять сеть. Сервер обрабатывает их и отправляет обратно ответы с той же скоростью. Это приводит к тому, что в момент времени 7 канал целиком заполнен, как показано на рис. 6.9.
Читать дальшеИнтервал:
Закладка: