Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С

- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Жанр:
- Издательство:Издательский дом «ДМК-пресс»
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С краткое содержание
В книге последовательно рассматриваются все этапы создания встраиваемых систем на микроконтроллерах с применением современных технологий проектирования. Задумав эту книгу, авторы поставили перед собой задачу научить читателя искусству создания реальных устройств управления на однокристальных микроконтроллерах.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
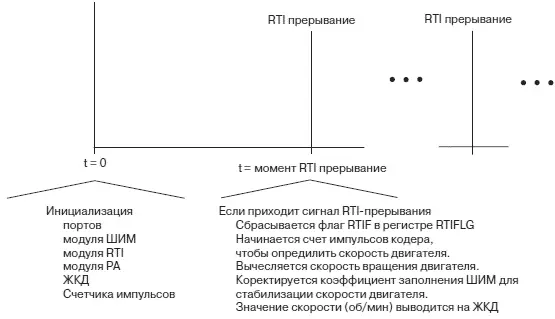
Рис. 7.16.Программа управления двигателем в режиме прерываний
5. Какие подсистемы, встроенные в 68HC12, должны быть использованы, чтобы выполнить эту задачу?На этот вопрос мы в сущности уже ответили. Однако для завершенности обсуждения составим список подсистем необходимых для выполнения проекта:
• Модуль ШИМ;
• Модуль меток реального времени;
• Счетчик внешних событий (Аккумулятор импульсов);
• Силовой коммутатор для управления двигателем;
• Оптический кодер;
• Жидкокристаллический (ЖК) индикатор.
7.4.2. Немного теории
В этом разделе мы более подробно исследуем некоторые из концепций, связанных с проектом, рассмотрев требования к двигателю, работу оптического кодера и конфигурирование прерываний в режиме реального времени на языке Си, а также программу на Си для подсчета импульсов с помощью подсистемы аккумулятора импульсов.
Требования к двигателю. Специфический двигатель, который мы используем — это двигатель постоянного тока, выпускаемый компанией Electro-Craft Corporation. Мы уже рассмотрели основные характеристики двигателя. Однако, имеется ряд дополнительных характеристик, которые требуются для этого проекта, таких, например, как зависимость скорости двигателя от его тока. Так как они не приводятся в информационных данных, мы получим их экспериментально. Будем изменять питающее напряжение, поданное на двигатель, и соответствующую этому напряжению скорость. Для этого подключим частотомер на выход оптического кодера, чтобы определить частоту следования импульсов при заданном питающем напряжении двигателя, и затем вычислим скорость вращения. Одновременно будем измерять также токи двигателя. Результаты эксперимента показаны на рис. 7.17.
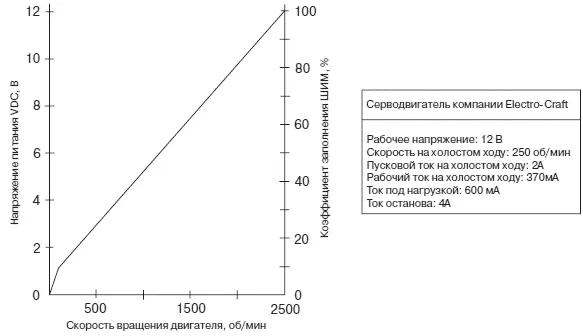
Рис. 7.17.Результаты испытаний двигателя
Оптический кодер. Существует широкое разнообразие оптических кодеров для определения скорости вращения вала двигателя. Эти кодеры закрепляются непосредственно на валу, или могут быть связаны с валом какими-либо устройствами. При установке кодера на вращающийся вал, это устройство обеспечивает на выходе прямоугольное напряжение. Кодеры питаются от постоянного напряжения 5 В, и рассчитаны на максимальную скорость вращения в 12 000 об/мин. Мы используем оптические кодеры, чтобы обеспечить измерение скорости вращения двигателя, как описано в [11]. Установка для измерения частоты вращения показана на рис. 7.18.
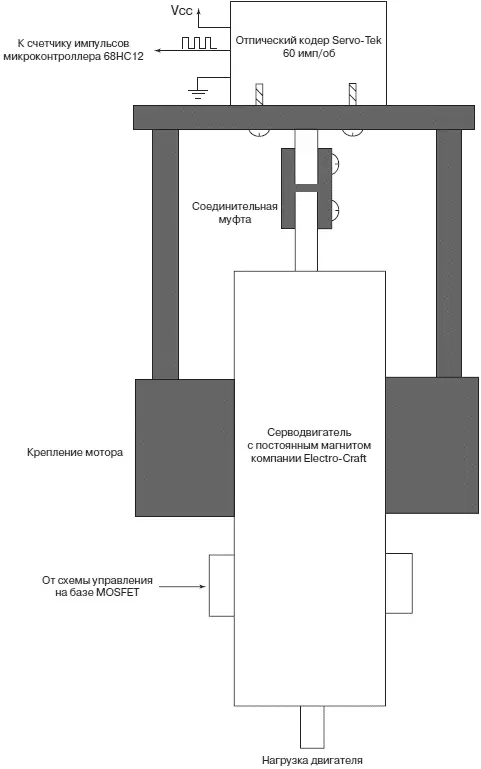
Рис. 7.18.Установка для измерения скорости вращения двигателя
Прерывания в режиме реального времени.Мы используем в МК 68HC12 модуль меток реального времени (RTI), периодически прерывая работу 68HC12, чтобы измерить скорость двигателя и скорректировать коэффициент заполнения ШИМ, если это необходимо для стабилизации скорости вращения двигателя. Перед обсуждением программного кода для управления RTI, мы советуем Вам, возобновить в памяти информацию о сбросах и прерываниях. Ниже приведен краткий обзор действий, необходимых, чтобы инициализировать прерывание RTI:
• Инициализируют вектор прерывания по запросу RTI;
• Устанавливают масштабирующий коэффициент RTR[2:0];
• Устанавливают флаг RTIE разрешения прерываний от RTI в регистре RTICTL;
• Очищают флаг RTIF в регистре RTIFLG;
• Разрешают все маскируемые прерывания прерывания (команда CLI).
Приведенные ниже программный код поможет Вам ознакомиться с работой RTI. В этом примере, мы переходим к программе ISR обработки прерывания RTI, переключая флаг порта PORTP. Если вы исследуете возникающую в результате форму сигнала, показанного на рис. 7.19, с помощью осциллографа или логического анализатора, то сможете измерить период повторения системы RTI прерываний.
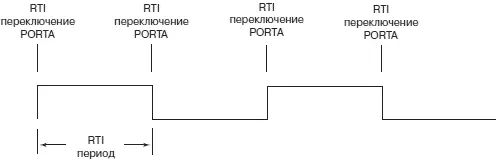
Рис. 7.19.Прерывания в режиме реального времени
//********************************************************************
//имя файла: RTI_test.с//
//Port P[0]: Конфигурируется как цифровой выходной порт, обеспечивающий TTL
// совместимые сигналы для управления затвором.
// авторы: Стив Барретт и Даниель Пак
//дата создания: Mar 10, 2003
//последняя редакция: Mar 10, 2004
//********************************************************************
#include <912b32.h>
#pragma interrupt_handler RTI_isr
//Функции-прототипы
//***************************************************
void initialize_ports(void); //инициализация портов
void RTI_isr(void);
void initialize_RTI(void);
//main program* *******************************************************
void main(void) {
//инициализация вектора сброса для B32
asm(".area vectors(abs)\n"
" .org 0xFFF0\n" // инициализация вектора прерывания RTI
" .word _RTI_isr\n"
" .org 0xFFF8\n" // инициализация вектора сброса для B32
" .word 0x8000, 0x8000, 0x8000, 0x8000\n"
" .text");
initialize_RTI(); //инициализация модуля RTI
initialize_ports(); //инициализация портов
PORTP = 0x01; // разрешение PORTP вывод 0
asm("cli"); //разрешение всех маскируемых прерываний
.
.
.
}
//********************************************************************
// определения функций
// ********************************************************************
//Initialize_ports: начальная конфигурация
//для портов входа/выхода
// ********************************************************************
void initialize_ports(void) {
DDRP=0xFF; //порт PORTP устанавливается как выходной
}
// ********************************************************************
//RTI_isr: подпрограмма обслуживания прерываний по RTI
//*********************************************************************
void RTI_isr(void) {
RTIFLG = 0x80; //сбрасывается флаг RTIF
PORTP =~(PORTP); //переключить выходы PORTP
}
// ********************************************************************
// ********************************************************************
//initialize_RTI:конфигурирует модуль RTI
// ********************************************************************
void initialize_RTI(void) {
RTICTL = 0x86; // устанавливается таймер RTI
RTIFLG = 0x80; //сбрасывается флаг RTIF
}
// ********************************************************************
Аккумулятор импульсов. Число импульсов, поступающих от оптического кодера, подсчитывается аккумулятором импульсов (PA). Он инициализируется в начале программы и затем фиксирует текущее число импульсов за интервал каждого прерывания RTI. По известному интервалу времени между прерываниями RTI (32.768 мс) можно определить число импульсов, поступивших на PA между двумя прерываниями, и затем вывести на дисплей скорость вращения двигателя. Для конфигурации PA системы существует специальный код.
Читать дальшеИнтервал:
Закладка: