Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С

- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Жанр:
- Издательство:Издательский дом «ДМК-пресс»
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С краткое содержание
В книге последовательно рассматриваются все этапы создания встраиваемых систем на микроконтроллерах с применением современных технологий проектирования. Задумав эту книгу, авторы поставили перед собой задачу научить читателя искусству создания реальных устройств управления на однокристальных микроконтроллерах.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Если бит MULT установлен в 1, то в измерительной последовательности будет производиться оцифровка сигналов разных каналов. При этом биты CC:CB:CA будут определять номер первого канала в последовательности, а биты S8C:S4C:S2C:S1C — число измерений в последовательности. Например, MULT = 1, CC:CB:CA = 010 b, а S8C:S4C:S2C:S1C = 011 b. Измерительная последовательность будет состоять из трех преобразований, последовательно будут измерены напряжения в каналах 2, 3, 4.
Дополнительные возможности по выборке данных из регистров результата модуля ADT HCS12 предоставляет режим FIFO (First In First Out — первым пришел, первым вышел). Если бит FIFO в регистре ATDCTL3 равен 0, то реализуется ранее рассмотренный порядок записи кодов преобразования в регистры результатов. При FIFO = 1 регистры результата образуют накопительный банк, который хранит 8 последних измерений. При каждом следующем преобразовании, результат преобразования записывается в банк, при этом первое из 8 хранящихся в банке измерений теряется.
4.23.5. Увеличение числа аналоговых входов
Увеличение числа аналоговых входов для подключения измеряемых сигналов в МК семейства HCS12 ведется не путем изменения структуры модуля ATD, который имеет 8 аналоговых входов, а путем увеличения числа модулей аналого-цифрового преобразования в составе отдельных моделей МК. Так МК MC9S12DP256B имеет в своем составе два модуля аналого-цифрового преобразования (ATD0 и ATD1).
4.23.6. Регистры модуля ATD HCS12
На рис. 4.93 приведены форматы новых, дополнительных по сравнению с ранее рассмотренной версией модуля ATD регистров специальных функций ATDSTAT0, ATDSTAT1, ATDDIEN, а также тех регистров, которые, сохранив прежнее имя, претерпели изменение формата.
Регистр состояния ATDSTAT0 — это однобайтовый регистр. Флаг завершения измерительной последовательности SCF этого регистра устанавливается в 1, если все преобразования назначенной измерительной последовательности завершены.
Флаг SCF может быть сброшен тремя способами:
• Программной установкой бита SCF в 1 (обычный способ);
• Программным запуском новой измерительной последовательности посредством записи в регистр ATDCTL5;
• Чтением регистра результата при установленном флаге разрешения режима быстрого сброса AFFC в регистре ATDCTL2.
Регистр состояния ATDSTAT1 — также однобайтовый регистр состояния. Содержит биты CCF7…CCF0, которые устанавливаются, когда в процессе выполнения измерительной последовательности произошла запись в одноименный регистр результата.
Регистр ATDDIEN содержит восемь битов IENn (n — номер канала). Если бит IENn равен 1, то соответствующая линия порта AD работает в режиме обычной линии ввода (цифровой ввод), при IENn = 0 линия порта AD с номером n работает в режиме аналогового ввода.
4.24. Подсистема широтно-импульсной модуляции
Микроконтроллер 68HC912B32 и все МК семейства HCS12 имеют в своем составе модуль широтно-импульсного модулятора PWM (Pulse Width Modulation). Широтно-импульсная модуляция (ШИМ) — это способ регулирования скорости вращения двигателя постоянного тока посредством изменения среднего значения напряжения, приложенного к обмоткам двигателя. ШИМ-сигнал может также использоваться для изменения направления движения радиоуправляемой модели автомобиля.
Среднее значение напряжения на обмотках двигателя определяется отношением длительности импульса напряжения (состояние «on» на рис. 4.94) к длительности периода следования импульсов. Это отношение называют коэффициентом заполнения γ, который является величиной безразмерной. Например, если коэффициент заполнения равен 80%, то длительность импульса напряжения (состояние «on») составляет 80%, а длительность паузы (состояние «off») — 20% от длительности периода следования импульсов. На рис. 4.94 показана форма напряжения на обмотках двигателя постоянного тока при двух значениях коэффициента заполнения γ = 20% и γ = 80%.
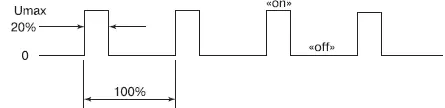
а) Коэффициент заполнения — 20%
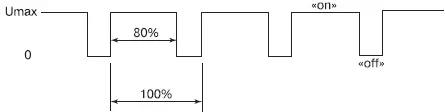
б) Коэффициент заполнения — 80%
Рис. 4.94.Временные диаграммы ШИМ-сигналов с различными коэффициентами заполнения
Рисунок 4.95 иллюстрирует способ управления двигателем постоянного тока с использованием ШИМ. Если коэффициент заполнения γ = 80%, то к обмоткам двигателя будет приложено среднее напряжение, равное 80% от напряжения сети постоянного тока U dc . Если коэффициент заполнения равен 100%, то это означает, что полупроводниковые ключи, используемые для коммутации напряжения к обмоткам двигателя, включены постоянно, и напряжение на обмотках двигателя не имеет импульсной формы. Отметим, что предельная нагрузочная способность выходов МК 68HC12/HCS12 недостаточна для коммутации токов и напряжений обмоток двигателя постоянного тока. Поэтому на выходах МК может быть воспроизведен только маломощный ШИМ-сигнал для управления двигателем, который затем должен быть усилен посредством специального полупроводникового коммутатора. Пример такого коммутатора будет рассмотрен в главе 5.
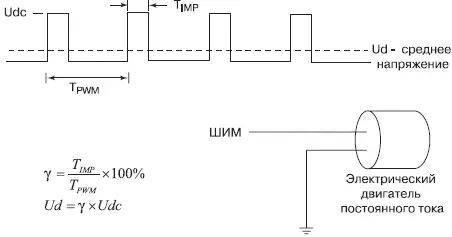
Рис. 4.95.Управление электрическим двигателем методом ШИМ
Широтно-импульсная модуляция используется не только для управления двигателем. Она имеет множество применений в технике управления различного рода исполнительными механизмами, в том числе в параграфе 4.24.5 будет рассмотрен пример формирования сигнала управления для серводвигателя, который приводит в движение рулевой механизм радиоуправляемой модели автомобиля.
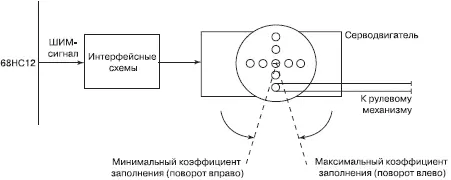
Рис. 4.96.Использование ШИМ для поворота рулевого колеса радиоуправляемой модели автомобиля.
4.24.1. Структура модуля PWM
Для генерации модулированных по длительности импульсных сигналов средствами модуля PWM необходимо рассчитать временные параметры этих сигналов в относительных единицах. Единицей измерения времени для модуля PWM служит период следования импульсов сигнала E_CLOCK, который является первичным сигналом тактирования программируемых делителей частоты и счетчиков в составе модуля PWM. Частота импульсной последовательности E_CLOCK равна частоте системной шины МК. Поскольку частота системной шины МК для каждого нового проекта выбирается разработчиком по совокупности технических требований к изделию, то для каждого проектируемого изделия длительность кванта времени модуля PWM может оказаться различной.
Читать дальшеИнтервал:
Закладка: