Дэвид Минделл - Восстание машин отменяется! Мифы о роботизации

- Название:Восстание машин отменяется! Мифы о роботизации
- Автор:
- Жанр:
- Издательство:Литагент Альпина
- Год:2016
- Город:Москва
- ISBN:978-5-9614-4694-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дэвид Минделл - Восстание машин отменяется! Мифы о роботизации краткое содержание
Но что останется от наших профессий – ученый, юрист, врач, солдат, водитель и дворник, – когда роботы научатся делать все это?
Профессор Массачусетского технологического института Дэвид Минделл, посвятивший больше двадцати лет робототехнике и океанологии, с уверенностью заявляет, что автономность и искусственный интеллект не несут угрозы. В этой сложной системе связь между человеком и роботом слишком тесная. Жесткие границы, которые мы прочертили между людьми и роботами, между ручным и автоматизированным управлением, только мешают пониманию наших взаимоотношений с робототехникой.
Вместе с автором читатель спустится на дно Тирренского моря, чтобы найти древние керамические сосуды, проделает путь к затонувшему «Титанику», побывает в кабине самолета и узнает, зачем пилоту индикатор на лобовом стекле; найдет ответ на вопрос, почему Нил Армстронг не использовал автоматическую систему для приземления на Луну.
Книга будет интересна всем, кто увлечен самолетами, космическими кораблями, подводными лодками и роботами, влиянием технологий на наш мир.
Восстание машин отменяется! Мифы о роботизации - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Как же мы можем сертифицировать предлагаемые Google модели риска и неопределенности? Любой автоматический алгоритм планирования пути включает тот или иной вариант этих неизвестных величин. Само планирование работает путем оптимизации так называемых «функций издержек», то есть заключается в постоянном поиске ответа на вопрос «Какой путь из этой точки в ту наиболее оптимален?» в отношении времени, затрат энергии, риска или какой-то другой переменной. Но сама функция издержек заключает в себе результат расстановки приоритетов людьми. В одной поездке, допустим, вы везете на заднем сиденье детей и вам хочется ехать осторожно, соблюдая все правила: в этом случае чаша весов должна склоняться в сторону безопасности, а не скорости. В другой раз вы можете путешествовать в одиночку и куда-нибудь спешить и вам захочется ехать побыстрее за счет увеличения риска. Или же у вас окажется мало топлива, и вам потребуется сделать приоритетным его экономию.
В качестве мысленного эксперимента давайте подумаем, не должен ли ваш автономный автомобиль быть оборудованным регулятором с надписью «риск»? Хотите попасть домой поскорее? Выкрутите регулятор «риск» до упора! Система переключится в режим более агрессивного вождения, вы попадете домой быстрее, и дополнительная сумма страховки автоматически спишется с вашего банковского счета. (А как насчет других водителей, которые при таком раскладе тоже рискуют больше? Повышение страховой ставки для них оплатите вы?) Или вы едете вместе с детьми? Тогда уверните регулятор риска обратно, и ваша машина будет следовать правилам дорожного движения со всей дотошностью.
Сознательно мы это делаем или нет, но именно такие решения мы принимаем каждый раз, садясь за руль. В случае автоматизированной машины от Google эти решения примет за вас некий инженер, размышляющий над ними в своем конструкторском бюро. Если мы все же хотим оставить возможность решения за собой, тогда нам необходим интерфейс. Как выглядит карта вашего города с отмеченными зонами риска? Вы когда-нибудь видели своими глазами трехмерные участки автономности?
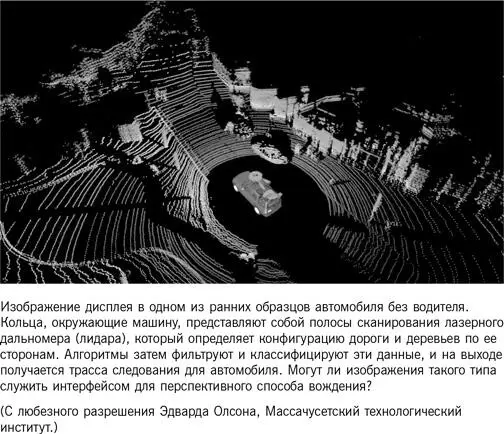
Эти мысленные эксперименты подсказывают нам подход, альтернативный тому, который предлагает компания Google, – не устранять водителя, а заново продумать его роль. Странно манящие, призрачные картинки сканированного лазером ландшафта, которые позволяют увидеть, что собой представляют внутренние модели автомобиля без водителя, теперь становятся основой нового интерфейса и нового процесса вождения. Как любил говорить мой коллега Билл Митчелл, «приборная доска должна быть интерфейсом города, а не интерфейсом двигателя».
Представьте: больше нет ограниченных, стесняющих циклов обратной связи по поддержанию движения строго по полосам и скоростного режима. Теперь мы сами – в определяющей роли, мы являемся теми, кто задает высокоуровневую стратегию поведения для автомобиля, но и органы управления остаются в наших руках. Мы используем модели среды, обогащенные алгоритмически обработанными данными датчиков, чтобы передвигаться в разные части спектра автоматизации в разные моменты времени, то оказываясь на участках автономии и риска, то покидая их.
Реализовать такую схему правильно будет непросто, но решение этих проблем сулит больше, чем утопические надежды на абсолютную автономию. Мы должны дать возможность передвижения пожилым, больным людям и инвалидам, позволить водителю отвлекаться от управления на другие задачи (обмен текстовыми сообщениями, чтение) и повысить безопасность, но все-таки сохранить центральную, определяющую роль человека-водителя.
Задачи компании Google и общий характер их заявлений на тему автономных машин не раз менялись в прошлом и могут измениться вновь под воздействием стремительно разворачивающейся общественной дискуссии. Те публичные заявления, которые делаются от имени компании, вероятно, отражают борьбу точек зрения внутри их собственной команды конструкторов. И все же культурное влияние самой компании Google настолько велико, что она определяет ход дебатов во всех сферах – от государственных законодательных органов до фирм – производителей автомобилей, и она не одинока в этом. И Главное управление по обеспечению безопасности дорожного движения США, и Ассоциация инженеров автомобилестроения устанавливают уровни автоматизации для автомобилей, и в этом явно или неявно находит воплощение миф о линейном прогрессе, завершающемся «полностью автоматическими транспортными средствами». Стандарты этих двух групп не оставляют места ни для гибридных режимов, в которых одни задачи могут выполняться с высокой степенью автоматизации, а другие – нет, ни для информационно обогащенной автоматизации, которая дает возможность водителю участвовать в управлении автомобилем.
Сторонники «гугломобилей» и многие журналисты технической прессы упускают из виду то, что вопросы ответственности за возможный риск и сертификацию техники – отнюдь не второстепенные «социальные» проблемы на пути этого, в остальных отношениях независимого технического новшества. Напротив, именно эти проблемы и являются ключевыми в деле автономии, и поиск решений принципиально важен для определения будущего и наших роботов, и нас самих. Это не просто какие-то технические вопросы – это вопрос о том, кому доверять управление.
Чтобы привести пример возможного альтернативного подхода, я закончу главу описанием двух проектов, в которых, начиная с ранних стадий, разработчики стремились увеличить роль человека и его осведомленность о внутренних состояниях автономной системы. Оба с самого начала нацелены на создание работающей в согласии человеко-машинной команды, а не на создание высокоавтоматизированной машины, к работе которой человек должен адаптироваться.

Беспилотный вертолет на большой скорости приближается к посадочной зоне. Он сканирует местность при помощи лазера – это похоже на лазерный сканер, установленный на крыше «гугломобиля», – который охватывает окружающий рельеф и выполняет тысячи измерений дальности. Выстраиваемой трехмерной топографической моделью лазерное устройство в реальном времени снабжает компьютер. Он, в свою очередь, применяет к полученным данным сложные алгоритмы и выстраивает различные варианты возможной траектории полета. Алгоритмы позволяют выявить плоские участки местности и найти участок, свободный от деревьев, проводов и других препятствий, где вертолет мог бы сесть. Они анализируют, достаточно ли та или иная площадка ровная, чтобы вертолет не перевернулся после посадки.
Читать дальшеИнтервал:
Закладка:


![Владимир Поселягин - Восстание машин [СИ,с издат.обложкой]](/books/1099346/vladimir-poselyagin-vosstanie-mashin-si-s-izdat-obl.webp)