Олег Ширяев - Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»

- Название:Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка»
- Автор:
- Жанр:
- Издательство:Казахский национальный университет имени аль-Фараби Литагент
- Год:неизвестен
- ISBN:978-601-04-2468-5
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Олег Ширяев - Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка» краткое содержание
Может быть использовано в войсках для подготовки офицерского состава и номеров расчетов подразделений ПВО СВ.
2-е издание
Устройство и эксплуатация зенитной самоходной установки ЗСУ-23-4 «Шилка» - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Схема командирского прибора наведения и органы управления показаны на рис. 3.9.
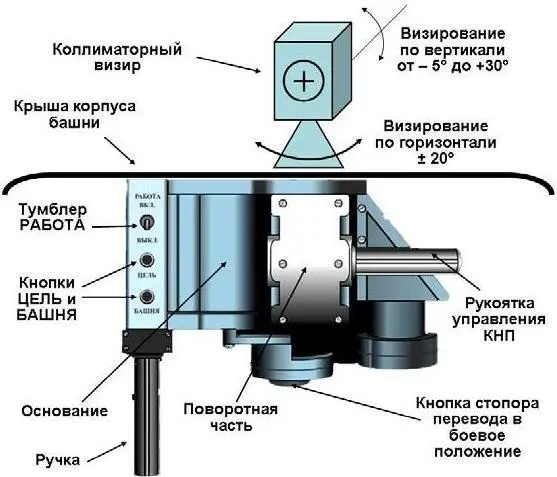
Рис . 3 . 9 .Общая схема командирского прибора наведения
Для включенияКПН следует установить тумблер РАБОТА в положение ВКЛ. и одновременно нажать кнопки БАШНЯ и ЦЕЛЬ, при этом должна загореться лампа ЦУ на пульте оператора поиска–наводчика.
Визирование цели заключаетсяв совмещении центра перекрестия коллиматорного визира с целью с помощью рукоятки управления. При этом схема управления башней и антенной обеспечивает наведение антенны на цель синхронно с поворотом рукоятки. Загорание лампочки ЦУ сигнализирует о включении системы управления антенной в режим наведения от КПН.

4. СИСТЕМА СТАБИЛИЗАЦИИ ЗСУ-23-4
4.1. Устройство, назначение, состав и технические данные системы стабилизации
Система стабилизации ЗСУ-23-4предназначена для сохранения неизменным направления антенны и стволов пушки при движении ЗСУ-23-4.
Система стабилизации дает возможность вести стрельбу при движенииЗСУ со скоростью до 40 км/ час и углах наклона до 10°, а также с места без горизонтированияустановки.
Система стабилизации включает(рис. 4.1) :– стабилизацию линии визирования (направления антенны на цель); – стабилизацию линии выстрела (направления стволов в упрежденную точку УТ).
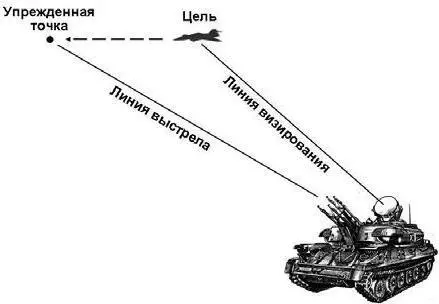
Рис . 4 . 1 .Линия визирования и линия выстрела
Составсистемы стабилизации:
– гироазимутгоризонт (ГАГ) – размещен под сиденьем оператора поиска–наводчика;
– визирный преобразователь координат (ВПК) – под сиденьем оператора дальности (рис. 4.2);
– орудийный преобразователь координат (ОПК) – под сиденьем командира установки (рис. 4.3);
– следящие приводы стабилизации СПС Δq и СПС Δε – размещены в антенной колонке Т-2:
– следящая система К – размещена в СРП.
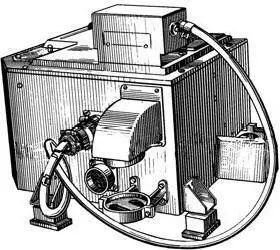
Рис . 4 . 2 .Визирный преобразователь координат
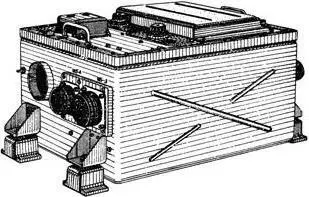
Рис . 4 . 3 .Орудийный преобразователь координат
Прежде всего, рассмотрим основные понятия и определения, необходимые для изучения работы системы стабилизации (рис. 4.4, 4.5 и 4.6).
Азимут целиβ – угол в горизонтальной плоскости между направлением на север и направлением на цель, отсчитываемый по ходу часовой стрелки.
Угол места целиε – угол между горизонтальной плоскостью и направлением на цель.
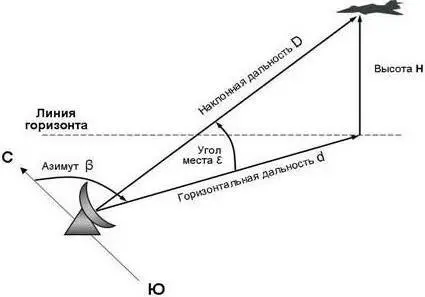
Рис . 4 . 4 .Координаты воздушной цели
Азимут упрежденной точкиβ у– угол в горизонтальной плоскости между направлением на север и направлением на УТ, отсчитываемый по ходу часовой стрелки.
Угол места упрежденной точки φ –угол между направлением на УТ и горизонтальной плоскостью.
Угол курса К– угол в горизонтальной плоскости от направления на север до продольной оси ЗСУ. Угол положителен при отклонении оси установки по ходу часовой стрелки от направления на север.
Угол q– угол в горизонтальной плоскости между осью установки и направлением на цель (линией визирования).
Угол qу– угол в горизонтальной плоскости между осью установки и направлением на УТ (линией выстрела).
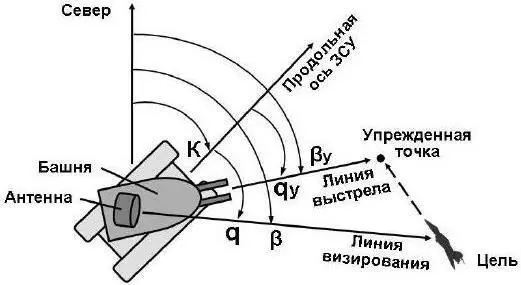
Рис . 4 . 5 .Углы в горизонтальной плоскости
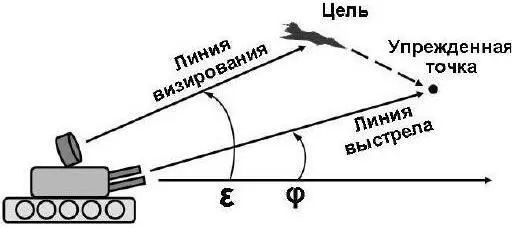
Рис . 4 . 6 .Углы в вертикальной плоскости
Угол галопирования Ψ– это угол поворота установки в продольной плоскости (рис. 4.7). Угол Ψ положителен, когда передняя часть установки выше задней.
Угол потаптывания Θ– это угол поворота установки в поперечной плоскости. Угол Θ положителен, когда левый борт установки выше правого.
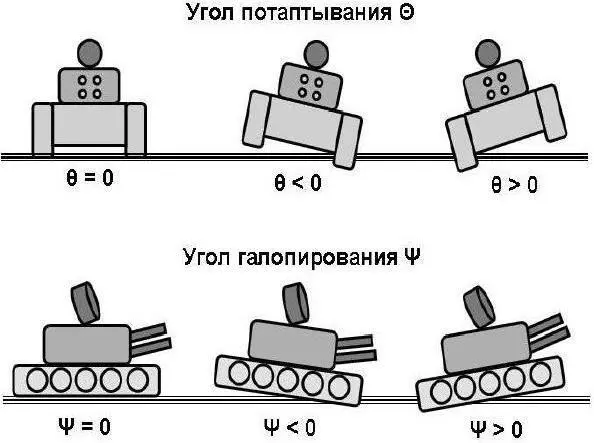
Рис . 4 . 7 .Углы качки ЗСУ-23-4
Угол Ф– полный угол наведения АЗП-23 по вертикали.
Угол Q– полный угол наведения АЗП-23 по горизонтали.
Полные углы – углы, в которых учтены наклоны и изменения курса ЗСУ.
Пределы работысистемы стабилизации:
– по углу продольной качки самохода (углу галопирования) Ψ – ± 10°;
– по углу поперечной качки самохода (углу потаптывания) θ – ± 10°;
– по углу курса К ЗСУ – неограниченно.
4.2. Устройство и принцип действия гироазимутгоризонта
Гироазимутгоризонт (ГАГ)– центральный прибор системы стабилизации, предназначен для измерения углов продольной и поперечной качки Ψ, θ, а также угла курса К установки (рис. 4.8).
Основой ГАГ является гироскоп.Это устройство с быстро вращающимся вокруг своей оси ротором. Скорость вращения составляет около 30 000 оборотов в минуту. За счет этого ось вращения сохраняет приданное ей первоначальное направление и остается неизменным в пространстве, несмотря на повороты и различные перемещения корпуса гироскопа.
При работе ГАГ создается горизонтальная стабилизированная площадка (гирогоризонт),относительно которой измеряются углы продольной и поперечной качки Ψ, θ. Кроме этого, ГАГ создает неподвижное ориентированное направление (гироазимут),относительно которого измеряется угол курса К установки.
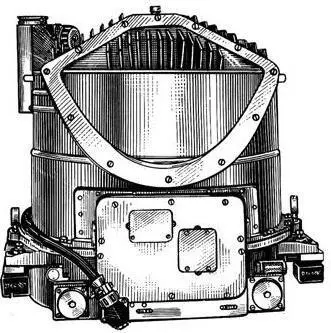
Рис . 4 . 8 .Гироазимутгоризонт
Измеренные углы в виде электрических напряжений поступают в орудийный и визирный преобразователи координат для стабилизации линии визирования и линии выстрела.
4.3. Принцип работы системы стабилизации
Работа системыстабилизации заключается в следующем (рис. 4.9).
РЛС 1РЛ33 сопровождает воздушную цель и определяет ее координаты – β, ε и Д, которые поступают в СРП. СРП решает задачу встречи снаряда с целью и определяет координаты упрежденной точки – βу и φ.
Читать дальшеИнтервал:
Закладка: