Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века

- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Жанр:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века краткое содержание
Освещаются актуальные в настоящее время вопросы обеспечения национальной безопасности на фоне стремительного развития боевых морских роботов, которое в ближайшем будущем может изменить баланс мировых сил. Автор рассматривает существующие и перспективные образцы необитаемых морских систем разного назначения, приводит анализ возможных асимметричных действий против новой угрозы, а также обозначает ряд возможных технических решений для систем борьбы с необитаемыми морскими аппаратами.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В приливе 18 внешнего торца ресивера 12 размещен поршень пневмопривода открывания основного клапана 14. Поршень 19 поджимается пружиной 20. В нем оформлено гнездо 22 системы наполнения ресивера воздухом, связанное каналом 21 с внутренним объемом ресивера 12. Для управления работой пневмопривода предусмотрен пусковой пневмоклапан 23 малого сечения с электромагнитным приводом.
На эскизе пунктиром показан герметичный колпак 24, обеспечивающий транспортную безопасность устройства.
Рис. 59. Схема ТПК.
Возможный вариант конструктивного оформления программного регулятора подачи воздуха из баллона 12 в расширительную полость 13 показан на рис. 60.
Рис. 60. Схема регулятора расхода воздуха — фигурной насадки.
Насадка 15 на выходной магистрали основного клапана 14 имеет фигурные прорези 25, обеспечивающие проход воздуха во внутреннюю полость втулки 16 и расширительную камеру 13.
Пусковая установка работает следующим образом.
На базе приготовления (например, арсенале) через гнездо 22 по каналу 21 в баллон набивается газ (воздух высокого давления). При этом, вследствие разности уплотняемых площадей с приводным поршнем 19, основной клапан 14 будет дополнительно к усилию пружины 20 прижат давлением к седлу, чем обеспечивается надежность герметизации баллона.
После подачи ТПК на носитель на глубине подводный аппарат 1 будет находиться в жидкости с добавлением ингибитора под забортным давлением вследствие малой жесткости мембраны 10.
Осуществление пуска подводного аппарата производится подачей электропитания на привод пневмоклапана 23. Давлением воздуха поршень 19 привода основного клапана 14 перемещает его в открытое положение. Из выходной магистрали воздух поступает во внутреннюю полость насадки 15 и далее по зазору между нею и профилированной поверхностью 17 втулки 16 в расширительную камеру 13, обеспечивая в ней повышение давления выше забортного. Поршень 3, перемещаясь вдоль пусковой трубы и компенсируя потерю воды через обтюрацию, обеспечивает ускоренное по отношению к нему движение подводного аппарата 1, так как площадь поршня 3 больше площади калиброванной части подводного аппарата, находящейся на срезе кольца 4 обтюрации.
В конце разгона подводного аппарата 1 поршень 3 тормозится и затем останавливается, так как плунжер 6 сжимает в демпфирующей полости 5 жидкость, постепенно под образующимся повышенным давлением выжимая ее через уменьшающееся с перемещением поршня сечение во внутреннюю полость пусковой трубы.
По одному из вариантов программное изменение проходной площади регулятора обеспечивается также (рис. 60) за счет профиля прорези 25 в насадке 15 и профиля внутренней поверхности 17 втулки 16, формирующих закономерное увеличение проходной площади регулятора при движении поршня 3.
Таким образом, устройство обеспечивает выпуск подводного аппарата с необходимой для безопасного отделения от носителя скоростью в заданном диапазоне глубин.
В качестве третьего примера транспортно-пускового контейнера приводится схема, разработанная автором. Ее характеризует упрощенная конструкция устройства, а также пониженная величина разброса выходной скорости выпускаемого подводного аппарата в широком диапазоне глубин использования устройства.
Предлагаемая конструкция приведена рис. 61, на котором показано общее устройство ТПК и рис. 62, на котором изображен разрез магистрали основного клапана и расположенного в ней шарового клапана. Также можно отметить, что данная конструкция является развитием описанной выше второй конструкции.
На рис. 61 изображен общий вид конструкции в разрезе, в котором подводный аппарат 1 размещен в пусковой трубе 2, расточенной под поршень 3, с неподвижно установленным в ее передней части обтюрирующим кольцом 4, образующим с внутренней поверхностью пусковой трубы демпфирующую полость 5, по размерам согласованную с кольцевым плунжером 6 поршня 3.
Подводный аппарат опирается головной частью на обтюрирующее кольцо 4, а челноками 7 — на пазы 8. При транспортировке и хранении в продольном направлении перемещение аппарата ограничивают кольцевой буфер 9 и разрывная мембрана 10, которая герметизирует внутренний, заполненный ингибитором объем пусковой трубы 2. Начальная фиксация поршня 3 от разворота относительно его продольной оси обеспечивается упорами 11.
С другой стороны трубы 2 герметично пристыкована включающая баллон 12 секция с образованием расширительной камеры 13. На торцевой, ограничивающей расширительную камеру 13, стенке баллона 12 размещен основной клапан 14, в выходной магистрали 15 которого установлен шаровой клапан 16, взаимодействующий с дистанционно управляемым шаговым электродвигателем 17, изменяющим при вращении его проходное сечение.
В приливе 18 внешнего торца ресивера 12 размещен поршень пневмопривода открывания основного клапана 14. В поджимаемом пружиной 20 поршне 19 привода оформлено каналом 21 связанное с внутренним объемом ресивера гнездо 22 системы наполнения ресивера воздухом. Для управления работой пневмопривода предусмотрен пусковой малого сечения пневмоклапан 23 с электромагнитным приводом.
На эскизе пунктиром показан герметичный колпак 24, обеспечивающий транспортную безопасность устройства.
На рис. 62 изображен разрез магистрали основного клапана и расположенного в ней шарового клапана, на котором обозначены расширительная камера 13, в которой расположена выходная магистраль 15 основного клапана 14, в которой установлен шаровой клапан 16.
Транспортно-пусковой контейнер работает следующим образом.
На базе приготовления через гнездо 22 по каналу 21 в баллон 12 набивается воздух высокого давления. Вследствие разности уплотняемых площадей с приводным поршнем 19 основной клапан 14 будет дополнительно к усилию пружины 20 прижат давлением к седлу, чем обеспечивается надежность герметизации баллона.
Рис. 61. Продольный разрез ТПК.
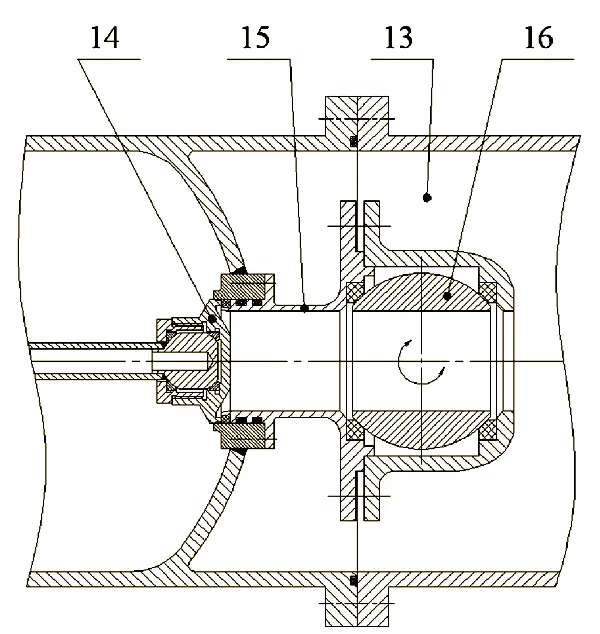
Рис. 62. Реализация регулятора расхода воздуха.
После установки транспортно-пускового контейнера на носителе и выхода последнего в море, на глубине подводный аппарат 1 будет находиться в жидкости с добавлением ингибитора под забортным давлением вследствие малой жесткости мембраны 10.
Читать дальшеИнтервал:
Закладка:
![Макс Глебов - Асимметричный ответ [СИ litres]](/books/1067943/maks-glebov-asimmetrichnyj-otvet-si-litres.webp)