Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века

- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Жанр:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века краткое содержание
Освещаются актуальные в настоящее время вопросы обеспечения национальной безопасности на фоне стремительного развития боевых морских роботов, которое в ближайшем будущем может изменить баланс мировых сил. Автор рассматривает существующие и перспективные образцы необитаемых морских систем разного назначения, приводит анализ возможных асимметричных действий против новой угрозы, а также обозначает ряд возможных технических решений для систем борьбы с необитаемыми морскими аппаратами.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
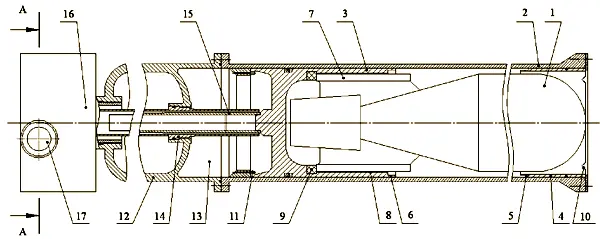
Рис. 63. Общая схема ПУ.
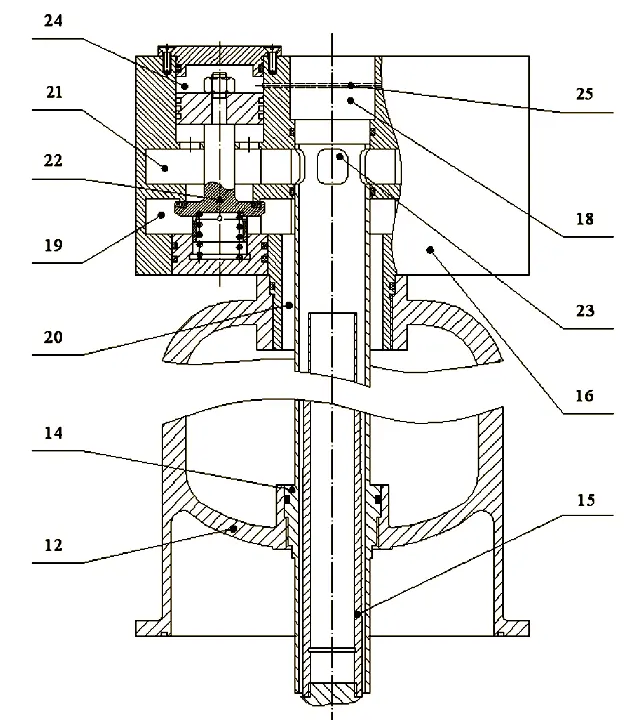
Рис. 64. Разрез клапанной коробки, баллона ВВД выходной магистрали.
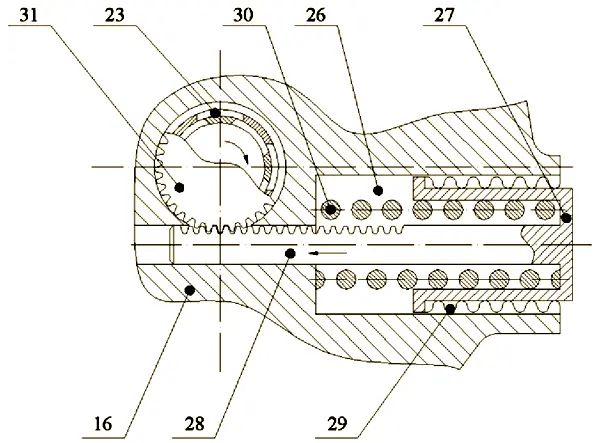
Рис. 65. Схема гидростата.
Осуществление пуска подводного аппарата производится подачей электропитания на привод не показанного на чертежах пускового клапана, который открывает доступ воздуха под давлением из полости 19 через внутренний канал 25 в управляющую полость 24 основного клапана 22. При уравнивании давления в управляющей полости 24 и во внутренней полости 19, за счет разности уплотняемых поверхностей, основная ступень регулятора откроется, обеспечивая доступ воздуха высокого давления во внутреннюю полость 21, а из нее — через проходные сечения 23 в выходную магистраль 14.
Из выходной магистрали 14 воздух, через кольцевой зазор между внутренней стенкой магистрали 14 и наружной поверхностью веретена 15, поступает в расширительную полость 13, обеспечивая повышение давления в ней выше забортного. Поршень 3, перемещаясь вдоль пусковой трубы и компенсируя потерю воды через обтюрацию, обеспечивает ускоренное по отношению к нему движение подводного аппарата 1, так как площадь поршня 3 больше площади калиброванной части подводного аппарата, находящейся на срезе кольца 4 обтюрации. Также движение поршня вызывает увеличение проходного сечения, через которое воздух поступает в расширительную полость, за счет вытягивания из выходной магистрали 14 веретено 15, имеющее, в том числе, и конические участки профилированной наружной поверхности.
В конце разгона подводного аппарата 1 поршень 3 тормозится и затем останавливается, так как плунжер 6 сжимает в демпфирующей полости 5 жидкость, постепенно выжимая ее под образующимся повышенным давлением через уменьшающееся с перемещением поршня сечение.
Также можно отметить, что специализированные подводные аппараты (оружие) не обязательно должны располагаться до момента пуска в ТПК.
В качестве примера альтернативной системы расположения НПА на носителе можно привести следующее техническое решение, направленное на размещение оружия (средств ПТЗ) в нишах легкого корпуса (специальных надстройках, «шайбах» хвостового оперения и т. п.) подводных лодок [61].
Предлагаемое устройство приведено на рис. 66, на котором изображен вид на размещаемый в нем аппарат «изнутри» легкого корпуса. Подводный аппарат размещен внутри корпуса носителя на поворотном щите, поворачивающемся относительно осей поворота. Вдоль поворотного щита проложены направляющие для каретки и направляющая для подводного аппарата. Внутри каретки расположена дополнительная направляющая, контактирующая с хвостовой частью аппарата и предотвращающая его вращение относительно собственной оси в процессе его выталкивания. В состав каретки входят два кожуха, внутри которых расположены пружинные приводы, упирающиеся в упорные стойки, жестко закрепленные на поворотном щите. В кожухах выполнены сквозные отверстия, предназначенные для подтока воды и снижения сопротивления движению каретки. Каретка застопорена во взведенном положении резьбовым штифтом, в который упирается один из кожухов. Головная часть подводного аппарата контактирует с контр-направляющей, которая расположена на обтекателе, жестко закрепленном на корпусе носителя.
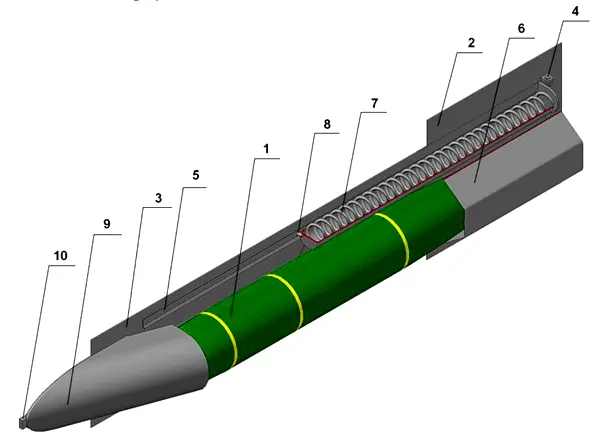
Рис. 66. Вариант расположения транспортно-пусковой системы подводного аппарата в нише легкого корпуса: 1 — НПА; 2 — легкий корпус; 3 — поворотный щит; 4 — поворотная ось; 5 — направляющие для каретки; 6 — каретка; 7 — пружинные приводы; 8 — стопорный штифт; 9 — контр-направляющая; 10 — защелка.
Приведенное устройство работает следующим образом.
При подготовке носителя к выходу из места базирования внутри специальных ниш в его корпусе монтируются подводные аппараты в необходимом количестве. Перед установкой подводного аппарата внутрь корпуса носителя поворотный щит открывается наружу, каретка с помощью не показанного приспособления взводится в рабочее состояние, при котором пружинные приводы находятся в сжатом виде. После взведения каретки, в гнездо, расположенное в поворотном щите перед кареткой, вворачивается резьбовой стопорный штифт, удерживающий каретку во взведенном состоянии. После этого в паз направляющей каретки вводится челнок хвостовой части подводного аппарата, располагаемого вдоль поворотного щита.
По окончании установки подводного аппарата поворотный щит поворачивается относительно осей поворота и закрывается таким образом, что его наружная поверхность становится заподлицо с наружной поверхностью корпуса носителя. При этом поворотный щит фиксируется в закрытом положении подпружиненной защелкой.
Непосредственно перед выходом носителя из пункта базирования из гнезда в поворотном щите выкручивается резьбовой стопорный штифт, в результате чего каретка с расположенным в ней подводным аппаратом смещается под действием пружинных приводов вдоль поворотного щита до контакта подводного аппарата с контр-направляющей. Таким образом, установленный на носитель подводный аппарат переводится в режим готовности к пуску.
Для отделения подводного аппарата от носителя, на электродвигатель, открывающий защелку, дистанционно подается напряжение. При этом защелка выходит из зацепления и освобождает поворотный щит от фиксации. При смещении подводного аппарата поворотный щит начинает открываться, поворачиваясь относительно осей поворота. Головная часть подводного аппарата за счет силы, действующей на него со стороны упорного диска каретки, на которую давят пружинные привода, начинает скользить по контр-направляющей. Подводный аппарат совместно с кареткой начинают двигаться вдоль поворотного щита по направляющим. При этом движение каретки и подводного аппарата зависит только от характеристик пружинных приводов.
Пройдя расстояние, достаточное для того, чтобы вытолкнуть подводный аппарат с требуемой выходной скоростью, каретка начинает торможение в тормозном устройстве. При этом происходит постепенное заклинивание направляющих элементов каретки, расположенных на кожухах, в сужающемся зазоре между ними и направляющими. Полная остановка каретки происходит в таком месте, чтобы ее положение не мешало последующему закрытию поворотного щита.
Читать дальшеИнтервал:
Закладка:
![Макс Глебов - Асимметричный ответ [СИ litres]](/books/1067943/maks-glebov-asimmetrichnyj-otvet-si-litres.webp)