БСЭ БСЭ - Большая Советская Энциклопедия (МЕ)

- Название:Большая Советская Энциклопедия (МЕ)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
БСЭ БСЭ - Большая Советская Энциклопедия (МЕ) краткое содержание
Большая Советская Энциклопедия (МЕ) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Рабочие движения в М. с. — главное движение и движение подачи. Главное движение, происходящее в направлении вектора скорости резания, обеспечивает отделение стружки от заготовки, а движение подачи — последовательное внедрение инструмента в заготовку, «захват» новых, ещё не обработанных участков. Главное движение в зависимости от типа М. с. может совершаться как заготовкой (токарные, продольно-строгальные и др. станки), так и инструментом (сверлильные, поперечно-строгальные, долбёжные, протяжные, фрезерные, шлифовальные и др. станки); это движение может быть вращательным (токарные, сверлильные, фрезерные, шлифовальные и др. М. с.) или поступательным (строгальные, долбёжные, протяжные и др. М. с.). Помимо рабочих движений, на М. с. совершаются также установочные и делительные движения, которые не используются в процессе обработки резанием, однако необходимы для осуществления полного технологического цикла. Все движения в М. с. обеспечивают соответствующие механизмы, в которые входят различные передачи: ремённые, зубчатые, червячные, реечные, винтовые, кулачковые, фрикционные и др. Эти передачи сочленяются между собой в определённой последовательности и образуют кинематические цепи, совокупность которых составляет кинематическую схему М. с. При этом пользуются условными обозначениями элементов и механизмов М. с. по ГОСТ 3462—61. На кинематических схемах указываются диаметры шкивов ( D 1, D 2и т.д.), числа зубьев зубчатых и червячных колёс ( z 1, z 2и т.д.), шаги винтов, заходности червяков и винтов, модули ( т ) некоторых зубчатых колёс (обычно находящихся в зацеплении с рейками), передаточные отношения плеч рычагов, характеристики звеньев настройки и др.
Для станков с вращательным главным рабочим движением скорость резания определяется по формуле:
где D — максимальный диаметр обработки (или максимальный диаметр инструмента) в мм; n — число оборотов шпинделя в минуту. Для конкретного М. с. диаметр заготовки (инструмента) может быть различным, может производиться также обработка заготовок из различных материалов и режущими инструментами с режущей частью из разных инструментальных материалов (что приводит к выбору соответствующих допускаемых скоростей резания). Привод главного движения должен обеспечивать поэтому регулирование числа оборотов шпинделя. Существует бесступенчатое и ступенчатое регулирование. В первом случае в определённом интервале можно за счёт фрикционного, гидравлического или электрического привода получить любое значение n . Во втором случае имеется определённый конечный ряд различных n . Это обеспечивается за счёт использования коробок скоростей с переключающимися зубчатыми колёсами. Для такого ряда рус. учёным А. В. Гадолиным в 1876 разработана и обоснована теория построения рядов чисел оборотов по закону геометрической прогрессии. При такой закономерности потери в устанавливаемых скоростях резания будут минимальными, а эксплуатационные свойства станка наилучшими. По этому закону все числа оборотов шпинделя станка в минуту от начального (миним.) n 1= n миндо конечного (макс.) n z= n максобразуют геометрический ряд, в котором знаменатель геометрической прогрессии j определяется по формуле:
где D диапазон регулирования числа оборотов шпинделя в 1 мин, z — количество ступеней регулирования. В станкостроении СССР значения j и соответствующие им перепады скоростей А стандартизированы:
| j | 1,06 | 1,12 | 1,26 1,25 | 1,41 1,4 | 1,58 1,6 | 1,78 | 2 |
| А , % | 5 | 10 | 20 | 30 | 40 | 45 | 50 |
Примечание. Во втором ряду указаны допускаемые округления.
Основной показатель любой кинематической цепи — общее передаточное отношение:
где n kи n н— числа оборотов соответственно конечного и начального звеньев в об/мин; U 1, U 2, U 3— передаточные отношения отдельных пар кинематической цепи. Значение U oбщпозволяет определить значения конечных перемещении звеньев, связанных кинематической цепью, т. е. заготовки и режущего инструмента. Соответствующие функциональные связи называют уравнениями кинематического баланса. Эти уравнения в 20—30-е гг. 20 в. выведены советским учёным Г. М. Головиным, предложившим единые формулы настройки для всех станков.
Для вращающихся конечных звеньев уравнение кинематического баланса: n k= n н· U oбщ; для вращающегося начального звена и поступательно-движущегося конечного: n н· U oбщ· Н = s m мм/мин, 1об · U oбщ· Н = s мм/об, где Н — величина хода кинематической пары, преобразующей вращательное движение в прямолинейное, равная перемещению прямолинейно движущегося звена за один оборот вращающегося звена (для токарного, сверлильного, фрезерного и др. станков).
Для М. с. с прямолинейным главным движением (строгальный, долбёжный, протяжный и др.) различаются рабочий ход, в течение которого происходит резание, и холостой (обратный) ход, в течение которого движущиеся части станка возвращаются в исходное положение. Скорость холостого хода V x= V p· X , где V p— скорость рабочего хода; Х = 1,5... 2,5 — коэффициент, выбираемый в зависимости от типоразмера станка.
Рабочий и холостой ходы составляют двойной ход. Время двойного хода:
где L — длина хода (в мм ) . Число двойных ходов (в 1 мин ) :

Для токарного станка с простой кинематической схемой ступенчатого главного привода ( рис. 2 ), согласно уравнению кинематического баланса, возможны следующие варианты числа оборотов шпинделя в 1 мин:
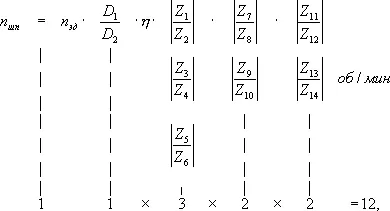
т. е. возможно 12 вариантов (h — коэффициент, учитывающий проскальзывание в ремённой передаче).
Для облегчения кинематических расчётов коробок скоростей применяется графоаналитический метод. Зависимость чисел оборотов и передаточных отношений изображается в виде графиков и структурных сеток.
Конструктивные особенности М. с.Все кинематические цепи и рабочие органы М. с. выполняются в виде конструктивных узлов (механизмов), состоящих из различных деталей. Узлы и детали М. с. можно разделить на 2 группы. Группа несущей и направляющей системы обеспечивает правильное направление прямолинейных и круговых перемещений узлов с изделиями и с режущими инструментами. К ней относятся станины и основания; детали и узлы для поддержания и обеспечения прямолинейных перемещений изделий (консоли, салазки столов, столы); детали и узлы для поддержания и обеспечения прямолинейных и качательных перемещении режущих инструментов (суппорты, салазки и поперечины суппортов, револьверные головки); детали и узлы для обеспечения вращения изделий и режущих инструментов (шпиндели, опоры шпинделей, планшайбы, вращающиеся колонны, задние бабки); детали и узлы для поддержания и направления вращающихся деталей М. с. (корпуса коробок скоростей, коробок подач и шпиндельных бабок). Группа привода и управления осуществляет формообразование деталей и движения управления. К ней относятся механизмы главного движения, движения подачи и делительных движений; механизмы вспомогательных движений (транспортирующих, зажимных, установочных, стружкоотводящих); механизмы управления (пуском и остановом, скоростью и реверсированием равномерных движений), копировальные, программные, адаптивные, самоподстраивающпеся системы. Конструктивные компоновки М. с. различных типов могут быть самыми различными в соответствии с рассмотренной ранее классификацией ( рис. 3 , а—т).
Читать дальшеИнтервал:
Закладка: