Олег Вальпа - Разработка устройств на основе цифровых сигнальных процессоров фирмы Analog Devices с использованием Visual DSP++

- Название:Разработка устройств на основе цифровых сигнальных процессоров фирмы Analog Devices с использованием Visual DSP++
- Автор:
- Жанр:
- Издательство:Горячая линия — Телеком
- Год:2007
- Город:Москва
- ISBN:5-93517-342-5
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Олег Вальпа - Разработка устройств на основе цифровых сигнальных процессоров фирмы Analog Devices с использованием Visual DSP++ краткое содержание
Книга предназначена для самостоятельного изучения и применения на практике цифровых сигнальных процессоров DSP (Digital Signal Processor). На примере популярной микросхемы ADSP2181 фирмы Analog Devices рассмотрены устройство, архитектура и технические характеристики цифрового сигнального процессора. Приведено описание вычислительных блоков процессора, средств разработки программного обеспечения, языка программирования и системы команд процессора. Разработанные автором книги практические схемы с применением сигнального процессора, исходные тексты программ и схемы вспомогательных устройств, полезных при отладке программ для процессора помогут получить необходимые практические навыки, с помощью которых читатель легко освоит другие типы сигнальных процессоров. На прилагаемом к книге диске находятся исходные тексты и исполняемые файлы программ, а так же некоторые полезные утилиты и средства разработки программного обеспечения для сигнальных процессоров.
Для специалистов в области разработки цифровой электронной аппаратуры, будет полезна студентам и аспирантам.
Разработка устройств на основе цифровых сигнальных процессоров фирмы Analog Devices с использованием Visual DSP++ - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
|TIMER |
|G_MODE |
|INTS |
Ключевые слова означают следующие режимы:
SEC_REG — фоновый регистровый файл;
BIT_REV — бит-реверс адреса генератора DAG1;
AV_LATCH — защелка статуса переполнения АЛУ (AV);
AR_SAT — насыщение регистра AR;
M_MODE — режим размещения результата MAC;
TIMER — разрешить работу таймера;
G_MODE — разрешить режим «Go mode»;
INTS — разрешить прерывания.
NOP — это команда отсутствия операций. Она часто применяется для выполнения холостого цикла процессора в качестве задержки на один такт.
Команда MODIFY позволяет модифицировать указатель адреса в заданном регистре I на величину, которая содержится в заданном регистре M, не обращаясь при этом к памяти. Как и во всех других случаях, регистры I и M должны быть регистрами одного и того же генератора адреса данных; любой регистр I0–I3 может использоваться в комбинации с любым регистром M0–M3, а любой регистр I4–I7 — с любым регистром M4–M7.
Команды PUSH и POP позволяют непосредственно управлять содержимым стеков состояния, счетчика, счетчика программ (PC) и циклов. Некоторые из этих стеков автоматически заполняются и опустошаются во время обслуживания прерываний.
Команды управления режимом разрешают и блокируют режимы некоторых операций процессора. Эта команды управляют режимами реверсной адресации в генераторе адреса данных 1, фиксацией переполнения АЛУ, насыщением регистра результата АЛУ, выбором набора основных или теневых регистров, режимом GO для непрекращающейся работы процессора во время предоставления шины, режимом сдвига в умножителе для выполнения целочисленных или дробных вычислений и активизацией таймера. За операторами ENA или DIS может следовать через запятую сколько угодно идентификаторов. Команды ENA и DIS могут повторяться в командной строке. Кроме того, все семь режимов могут разрешаться, блокироваться или изменяться при помощи всего одной команды.
Часть III. Вычислительные и аппаратные устройства
В этой части книги говорится о вычислительных и аппаратных устройствах сигнального процессора, к которым относятся арифметико-логическое устройство ALU, устройство умножения MAC, устройство сдвига, устройство обмена между шинами, программный автомат, генераторы адресов, таймер и синхронные последовательные порты. Дается описание архитектуры этих устройств и выполняемых с их помощью команд.
Глава 14. Устройство АЛУ
Как уже говорилось ранее, процессор ADSP-2181 содержит три независимых вычислительных устройства (рис. 14.1). К их числу относятся: арифметико-логическое устройство (ALU), умножитель с накопителем (MAC) и устройство сдвига (SHIFTER). Эти устройства работают с 16-разрядными данными и имеют аппаратную поддержку обмена данными, позволяющую обеспечить многопоточность.
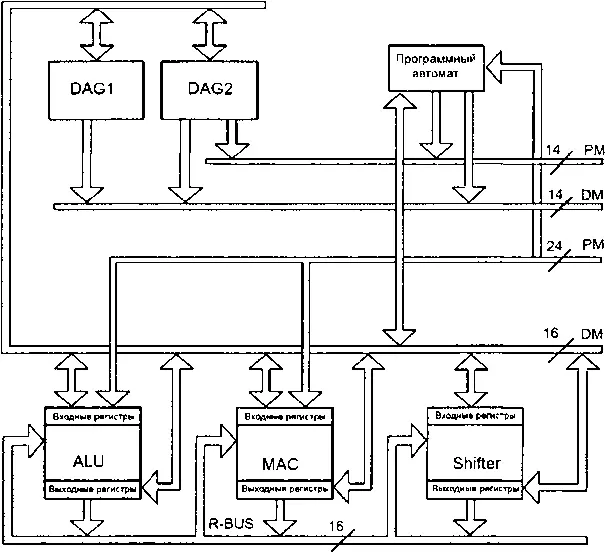
Рис. 14.1. Процессор ADSP-2181
Арифметико-логическое устройство выполняет ряд стандартных арифметических и логических команд. MAC выполняет одноцикловые операции умножения, умножения-сложения и умножения-вычитания. SHIFTER осуществляет логические и арифметические сдвиги, нормализацию, денормализацию и операцию получения порядка, а также управление форматом данных, разрешая работу с плавающей точкой.
Вычислительные модули размещаются последовательно друг за другом таким образом, чтобы выход одного мог стать входом другого в следующем цикле. Результаты работы вычислительных устройств собираются на 16-разрядную шину R-BUS.
Все три устройства содержат входные и выходные регистры, которые доступны через 16-разрядную шину данных. Команды, выполняемые в устройствах, берут в качестве операндов данные, находящиеся в регистрах ввода, и после выполнения операции записывают результат в регистры вывода. Регистры являются как бы промежуточным хранилищем между памятью и вычислительной схемой. Шина R-BUS позволяет результату одного вычисления стать операндом для другой операции. Это экономит время благодаря исключению лишних пересылок данных между устройствами и памятью.
Рассмотрим подробнее ALU. Его структурная схема приведена на рис. 14.2.
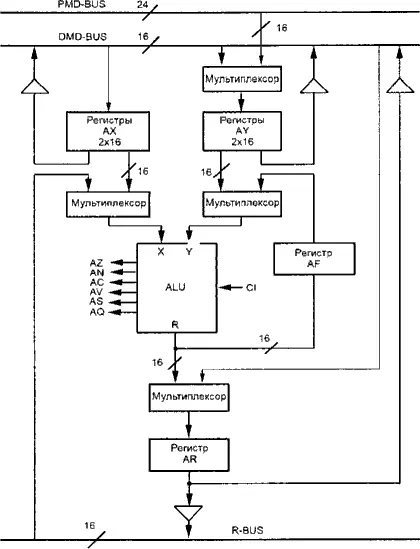
Рис. 14.2. Структурная схема ALU
Арифметико-логическое устройство является 16-разрядным устройством с двумя 16-разрядными входными портами данных X и Y и одним выходным портом результата R. ALU генерирует шесть сигналов состояния: ноль (AZ), негатив (AN), перенос (AC), переполнение (AV), знак (AS) и частное (AQ). В конце каждого цикла процессора эти сигналы сохраняются в регистре состояния процессора ASTAT. Описание назначения этих сигналов состояния приведено в табл. 14.1.
Таблица 14.1 Описание назначения сигналов состояния
| Сигнал | Расшифровка | Назначение |
|---|---|---|
| AZ | ZERO (НОЛЬ) | Разряд нулевого результата. Устанавливается в 1, если результат операции равен нулю. Является результатом логического сложения всех битов регистра результатов ALU |
| AN | NEGATIV (НЕГАТИВ) | Знаковый разряд результата ALU. Устанавливается в 1, если результат отрицательный |
| AV | OVERFLOW (ПЕРЕПОЛНЕНИЕ) | Разряд переполнения. Устанавливается в 1, если происходит переполнение ALU путем переноса 1 в знаковый разряд при сложении чисел |
| AC | CARRY (ПЕРЕНОС) | Разряд переноса. Устанавливается в 1 при сложении беззнаковых чисел, если происходит переполнение ALU путем переноса 1 из старшего разряда |
| AS | SIGN (ЗНАК) | Знаковый разряд. Определяется при операции вычисления абсолютного значения числа ABS. Устанавливается в 1, если операнд имеет отрицательное значение |
| AQ | QUOTIENT (ЧАСТНОЕ) | Разряд состояния частного. Формируется только командами DIVS и DIVQ |
Порт ввода X может принимать данные от двух источников: из блока регистров АХ или с шины результата R-BUS. Шина R-BUS обеспечивает обмен данными между всеми вычислительными устройствами. Блок регистров АХ состоит из двух регистров: AX0 и AX1. Эти регистры подключены к шине памяти данных DMD-BUS. Система команд позволяет читать содержимое регистра АХ и на шину памяти программ PMD-BUS, для этого используется устройство обмена между шинами. Выводы регистров AX0 и AX1 реализованы таким образом, чтобы один из них служил операндом для ALU, а другой в это время мог считываться на шину DMD-BUS.
Порт ввода Y также принимает данные от двух источников: из блока регистров AY и регистра обратной связи AF. Блок регистров AY состоит из двух регистров AY0 и AY1. Эти регистры доступны для чтения и записи с шиной DMD-BUS. Система команд процессора позволяет читать регистры AY0 и AY1 с помощью шины PMD-BUS, но также с использованием устройства обмена между шинами. Выводы регистров AY0 и AY1 реализованы аналогично регистрам AX0 и AX1.
Читать дальшеИнтервал:
Закладка: