Валерий Шульговский - Основы нейрофизиологии

- Название:Основы нейрофизиологии
- Автор:
- Жанр:
- Издательство:Аспект Пресс
- Год:2000
- Город:М.
- ISBN:ISBN 5-7567-0134-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Валерий Шульговский - Основы нейрофизиологии краткое содержание
В книге изложены современные представления о функции клеток и нервной регуляции, а также о комплексной иерархической регуляции основных видов деятельности организма. В основу книги положены курсы лекций, прочитанных автором в течение ряда лет в МГУ им. М. В. Ломоносова и Гуманитарном институте.
Для студентов, аспирантов педагогических и гуманитарных университетов.
Основы нейрофизиологии - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Универсальный принцип рефлекторной деятельности спинного мозга получил название общего конечного пути. Дело в том, что соотношение количества волокон в афферентных (задних корешках) и эфферентных (передних корешках) путях спинного мозга составляет примерно 5:1. Ч. Шеррингтон (выдающийся английский физиолог, современник И. П. Павлова) образно сравнивал этот принцип с воронкой (воронка Шеррингтона), широкую часть которой составляют афферентные пути задних корешков, а узкую эфферентные пути передних корешков спинного мозга. Нужно помнить, что общий конечный путь, являясь при осуществлении рефлекторной деятельности спинного мозга функциональным образованием, часто оказывается сложным. Нередко территория конечного пути одного рефлекса перекрывается с территорией конечного пути другого рефлекса. Другими словами, разные рефлексы могут соревноваться за занятие конечного пути. Это можно проиллюстрировать таким примером. Представим себе, что собака убегает от опасности и ее в это время кусает блоха. В данном примере за общий конечный путь – мышцы задней лапы – соревнуются два рефлекса: один – чесательный, а другой – рефлекс ходьбы-бега. В одни моменты может пересиливать чесательный рефлекс, и собака останавливается и начинает чесаться, но затем вновь верх может взять рефлекс ходьбы-бега, и собака возобновит бег.
Как уже указывалось, при осуществлении рефлекторной деятельности отдельные рефлексы спинного мозга взаимодействуют друг с другом, образуя функциональные системы. Один из самых важных элементов функциональной системы – обратная афферентация, благодаря которой нервные центры как бы оценивают, как выполняется реакция, и могут внести в нее необходимые коррективы. Некоторые конкретные механизмы обратной афферентации будут рассмотрены ниже.
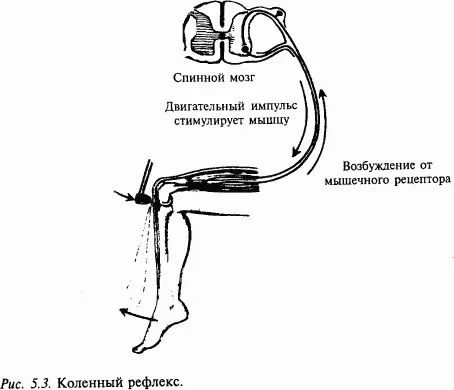
Один из таких примеров – рефлекс на растяжение. Примером такого рефлекса может служить коленный рефлекс, который возникает при легком ударе по сухожилию мышцы в подколенной чашечке (рис. 5.3). Рефлекс на растяжение предотвращает чрезмерное растяжение мышцы, которая как бы сопротивляется растягиванию. Этот рефлекс возникает как ответная реакция мышцы на стимуляцию ее рецепторов, поэтому его часто обозначают как собственный рефлекс мышцы.
Известны два вида рефлекса на растяжение: тонический (медленный) и фазический (быстрый). Для разделения этих двух типов рефлексов применяют два способа растягивания мышцы: медленное растягивание мышцы вызывает тонический рефлекс на растяжение, быстрое – фазический рефлекс. Примерами фазических рефлексов на растяжение могут служить коленный и ахиллов, флекс вызывают легким ударом по ахиллову сухожилию. Доказательством того, что эти рефлексы осуществляются за счет активации рецепторов только самих мышц, а не сухожилий или суставов, может служить их сохранение при анестезии суставной сумки. Примером тонического рефлекса на растяжение может быть собственный рефлекс икроножной мышцы. Это одна из главных мыш, благодаря которой поддерживается вертикальная поза человека.
Физиология опорно-двигательного аппарата. Познакомимся с некоторыми принципами деятельности мышц нашего тела. С функциональной точки зрения мышца состоит из двигательных единиц. Двигательная единица – это группа мышечных волокон, которые иннервируются одним мотонейроном и поэтому функционируют как единое целое по принципу «все или ничего» (возбуждается или не возбуждается). Среднее количество мышечных волокон, приходящихся на одну двигательную единицу, варьирует в разных мышцах от 4–6 волокон, участвующих в тонких движениях (например, глазодвигательная мышца), до 2000 – у больших мышц, находящихся в постоянном тоническом сокращении (например, икроножная мышца). Территория двигательной единицы на поперечном срезе близка к кругу, и, как правило, одну и ту же территорию занимают 2–3 двигательные единицы. Другими словами, имеет место перекрытие отдельных территорий, занимаемых двигательными единицами. В связи с тем что каждая двигательная единица сокращается по принципу «все или ничего», такая структура мышцы обеспечивает гладкость ее сокращения в условиях, когда отдельные двигательные единицы работают в режиме одиночных сокращений. Поэтому градация силы сокращения целой мышцы осуществляется преимущественно за счет вовлечения в деятельность новых двигательных единиц. В естественных условиях «гладкость» сокращения мышцы обеспечивается асинхронностью работы разных двигательных единиц.
В мышцах человека, а также других млекопитающих есть два типа двигательных единиц – быстрые и медленные. Быстрые двигательные единицы иннервируются крупными мотонейронами и могут развивать большую силу, но быстро утомляются. В отличие от них медленные двигательные единицы иннервируются мелкими мотонейронами и могут длительно поддерживать активность тонического типа. Наличие двух типов двигательных единиц – быстрых фазических и медленных тонических – является приспособлением мышцы для работы в широком диапазоне силовых нагрузок.
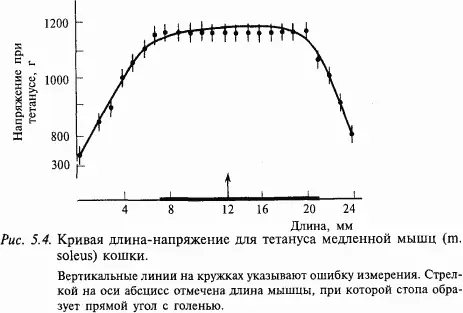
Мышцы млекопитающих животных хорошо приспособлены для выполнения своих функций. Известно, что максимальное напряжение при тетанусе мышца развивает только при своей «нормальной» длине, т.е. при той, которую она имеет в состоянии покоя в организме. Специальные исследования показали, что эти оптимальные условия для сокращения мышцы (развития максимальной силы) соответствуют и физиологическому диапазону движения в суставе. На рис. 5.4 приведена кривая длина-напряжение камбало-видной мышцы, полученная при изометрическом сокращении. Видно, что кривая тетанического напряжения мышцы имеет большое плато, охватывающее диапазон около 12 мм. Это имеет важное значение при длительных рефлексах позы: проекция плато на ось абсцисс примерно совпадает с отрезком, выделенным жирной линией, которая соответствует диапазону возможных положений голеностопного сустава у интактной кошки от максимально разогнутого до максимально согнутого.
Существует зависимость между характеристиками двигательной единицы и характеристиками соответствующего мотонейрона. Так, низкопороговые маленькие (диаметр сомы до 20 мкм) мотонейроны с низкой скоростью проведения по аксонам в рефлекторных реакциях ведут себя как тонические и иннервируют медленные двигательные единицы, которые развивают небольшую силу, но устойчивы к утомлению и поэтому способны к длительной работе. Высокопороговые большие (диаметр сомы 50–70 мкм) мотонейроны с высокой скоростью проведения по аксону ведут себя в рефлекторных реакциях как фазические и иннервируют быстрые двигательные единицы. Сила, развиваемая быстрыми двигательными единицами, относительно велика, но они хуже приспособлены к длительной работе. Эти экспериментальные данные позволили высказать гипотезу, что в условиях диффузной активации мотонейронов, иннервирующих данную мышцу из вышележащих мозговых структур, организующая роль в возбуждении мышцы принадлежит порогам отдельных мотонейронов. Эти пороги определяются морфологическими размерами мотонейронов (принцип размера): маленькие нейроны имеют низкий, а большие – более высокий порог активации. Благодаря этому принципу обеспечивается автоматический выбор активируемых двигательных единиц в условиях той или иной двигательной задачи. Вначале включаются медленные тонические мышцы, а затем на их фоне сокращаются быстрые фазические мышцы.
Читать дальшеИнтервал:
Закладка: