Валерий Варламов - Противодействие полиграфу и пути их нейтрализации

- Название:Противодействие полиграфу и пути их нейтрализации
- Автор:
- Жанр:
- Издательство:ПЕР СЭ-Пресс
- Год:2005
- Город:Москва
- ISBN:5-98549-007-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Валерий Варламов - Противодействие полиграфу и пути их нейтрализации краткое содержание
Книга рассчитана на круг читателей, интересующихся проблемой полиграфных проверок.
Противодействие полиграфу и пути их нейтрализации - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
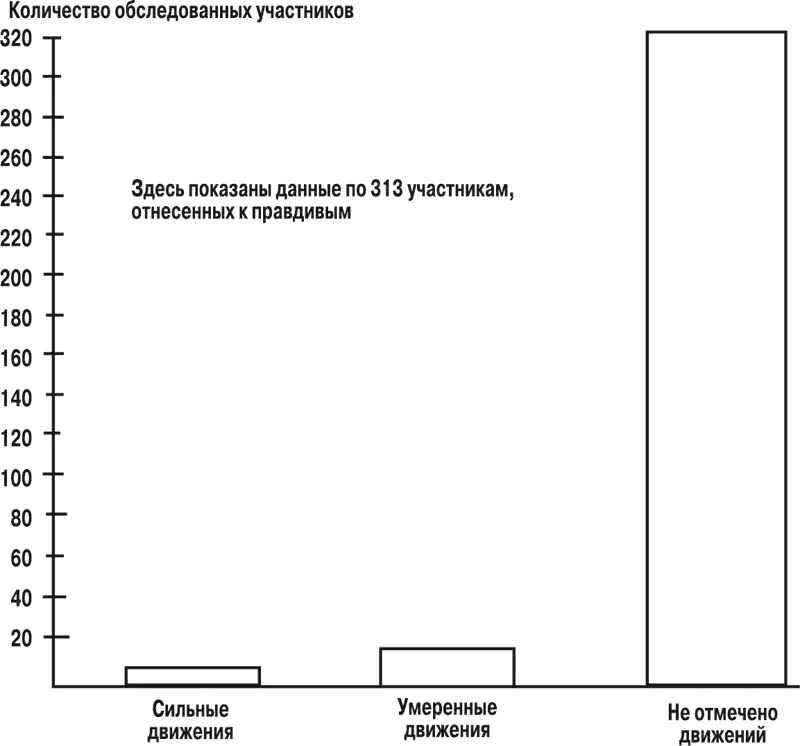
Рис. 22. Распределение по интенсивности механических перемещений в группе «правдивых» участников (цит. по: Kenneth E. Murray, 1989).
Несмотря на большую эффективность использования кресла, оно было громоздко и неудобно в эксплуатации. Позже кресло неоднократно модифицировалось фирмами производителями полиграфов (Сталтинг, Лафайет, Акситон, – США, Арисет – в России). В современных системах оценки противодействий в комплект полиграфа включается ряд датчиков, устанавливаемых под ножки кресла и фиксирующих механические противодействия (рис. 23 часть А). Но они слабо защищены от внешних помех (рис. 25). Так, у полиграфов фирмы Лафайет на эффективность работы системы оценки механических противодействий влияет тип пола, на котором он устанавливается. Старый деревянный пол вносит большие помехи в полезный сигнал.
Российская фирма «Орисет» более 10 лет занимается разработкой систем, фиксирующих механические противодействия.
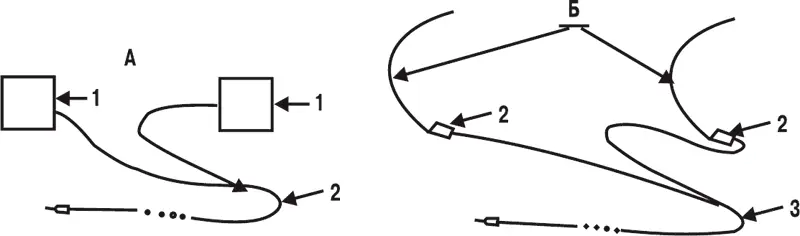
Рис. 23. Различные устройства для съема тремора. А – датчик тремора, устанавливаемый под ножки стула (1 – блок съема информации; 2 – соединительный кабель). Б – датчик тремора, устанавливаемый на икроножные мышцы (1 – крепление датчика; 2 – блок съема информации; 3 – соединительный кабель).
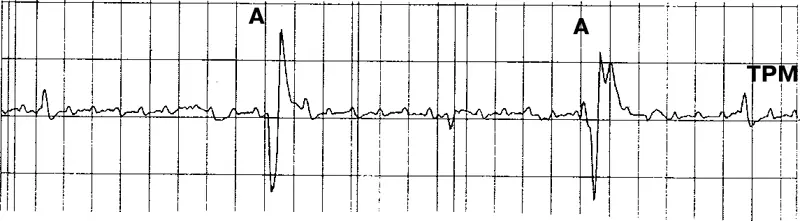
Рис. 24. Тремор, зарегистрированный с датчиков, установленных на икроножных мышцах обследуемого. А – шевеление пальцами стопы.
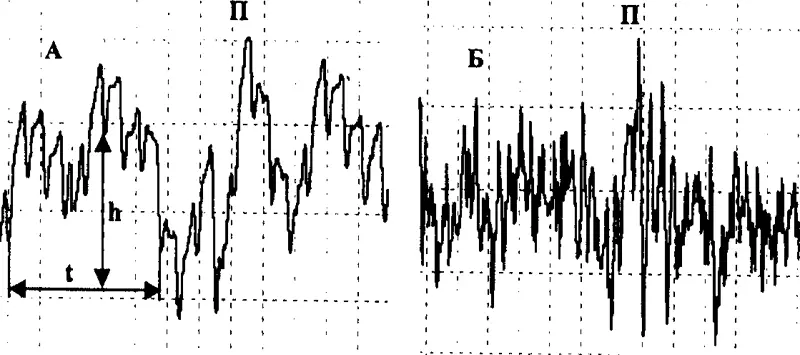
Рис. 25. Специфика тремора, зарегистрированного с датчиков, установленных под передними ножками кресла. А – обследуемый сидит, не опираясь на спинку кресла; Б – обследуемый сидит, опираясь на спинку кресла; П – искусственно создаваемая помеха (надавливание большим пальцем ноги на пол); h – амплитуда дыхательной волны на кривой тремора; t – продолжительность дыхательной волны на кривой тремора.
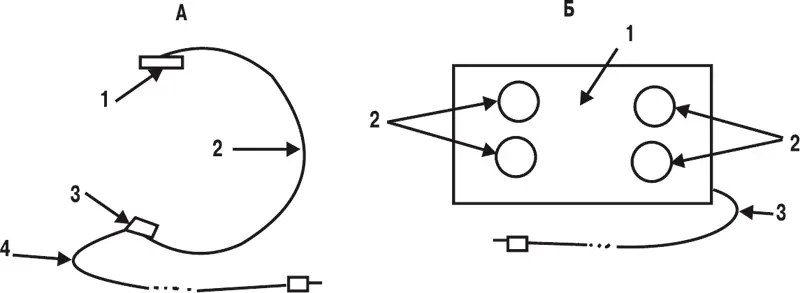
Рис. 26. Различные устройства для съема тремора. А – датчики фиксации механических перемещений языка (1 – резиновая пластинка; 2 – стальная пружина; 3 – блок съема информации; 4 – соединительный кабель). Б – универсальный блок съема информации о механических противодействиях (1 – корпус блока; 2 – чувствительные элементы отслеживания микроперемещений; 3 – соединительный кабель).
Она поставляла датчики для полиграфов класса «Барьер14», «Крис» и «Риф», закрепляемые на икроножных мышцах обеих ног. В данном случае сигнал противодействия был более четким, что позволило определять его автоматически (рис. 24).
В 2000 году создан датчик съема информации о физических противодействиях с использованием языка или прикусыванием щеки (рис. 26 часть А). Соответствующие методические приемы с использованием временного, фазового анализа позволили фирме решить эту проблему без установки дополнительного датчика на тело обследуемого и позволили отказаться от датчиков этого типа.
Изучение фирмой всех возможных механических способов противодействия привело к созданию методического комплекса, позволяющего фиксировать все известные способы физического противодействия (рис. 26 часть Б). Эти системы поэтапно будут поставлены владельцам полиграфов, имеющих аппараты этой фирмы.
Эффективность этой системы хорошо прослеживается на записи тремора (рис. 27 и рис. 28), где зафиксированы некоторое виды механического противодействия.
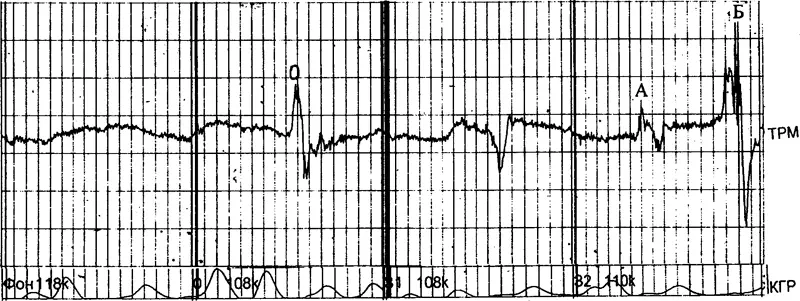
Рис. 27. Ответные реакции на различные противодействия, зафиксированные с сиденья кресла. Φ – фон (состояние покоя); О – быстрое сокращение мышц анального отверстия; 3j – медленное сокращение мышц анального отверстия; 32-А – сокращение мышц большого пальца стопы; 32-Б – сокращение мышц всех пальцев стопы.
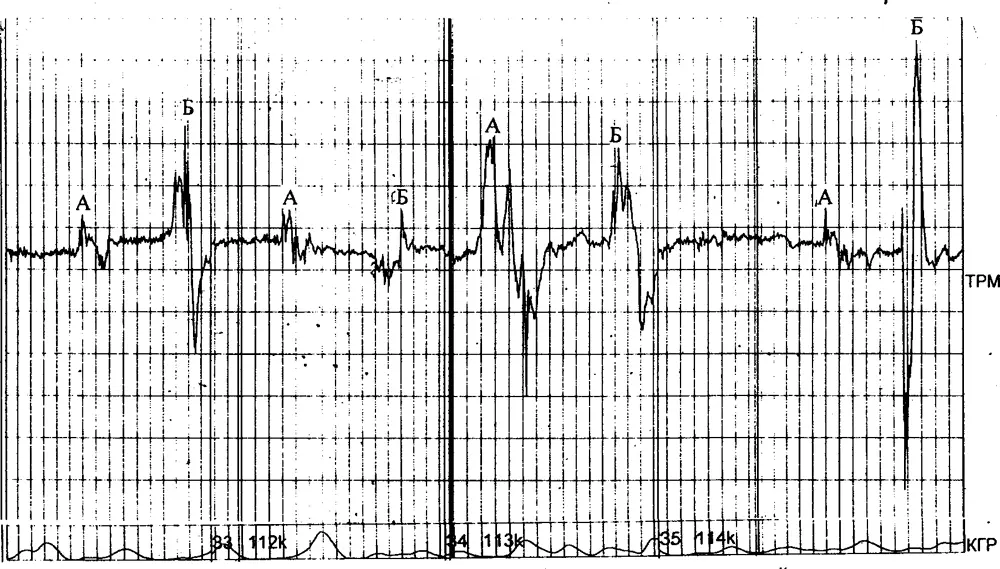
Рис. 28. Ответные реакции на различные механические противодействия, зафиксированные с сиденья кресла. 33-А – сокращение мышц стопы; 33-Б – сокращение большой грудной мышцы; 34-А – напряжение мышц плечевого сустава; 34-Б – напряжение мышц локтевого сустава; 35-А – сокращение икроножной мышцы; 35-Б надавливание пяткой.
4. Заключение
Механические способы противодействия – наиболее простые в своей реализации и поэтому наиболее часто встречаются в практике полиграфологов. Применение некоторых из них вообще не требует какой-либо тренировки. Подложил кнопку в ботинок, и дави. Механических способов противодействия, приемов, используемых для искажения информации, в арсенале системы противодействия множество. Их влияние на кривые полиграмм велико, но не фатально. Современные полиграфы и полиграфные технологии позволяют вовремя выявлять их наличие и принимать соответствующие контрмеры. Тщательный анализ кривых полиграмм позволяет отделить естественную реакцию на стимул от искусственной, вызванной противодействием. Особенно если используются тесты, в которых отсутствуют контрольные вопросы. У лиц, препятствующих полиграфному тестированию, большие сложности вызывает время включения механического противодействия. После предъявления стимула опрашиваемый должен оценить социальную значимость полученной информации, принять решение о противодействии и «включить» соответствующие мышечные группы. Все это затягивает во времени ответную реакцию. Для устранения этого «недостатка» обследуемый должен как можно быстрей активировать необходимый мышечный комплекс. В то же время быстрое сокращение мышечных групп легко прослеживается специалистом, и что самое главное – соответствующие датчики регистрируют мощный отклик на полиграмме. Современное развитие технологии полиграфных процедур позволяет практически в 100 % случаев дифференцировать, вызваны ли реакции предъявленным стимулом или физическими методами противодействия. Для успешного решения этой задачи необходимо: 1. Активно использовать речевой аппарат обследуемого. Он в обязательном порядке должен отвечать на предъявленный стимул словами «Да» или «Нет» (возможно и другое содержание ответа). Это делает невозможным использование прикусывания языка, щек в качестве источника ложных сигналов на кривых полиграммах. Кривая КР, вызванная искусственным противодействием, будет значительно запаздывать во времени.
Читать дальшеИнтервал:
Закладка:


![Валерия Праздникова - Дневник Странных Путей. Книга 1 [СИ]](/books/1094587/valeriya-prazdnikova-dnevnik-strannyh-putej-kniga.webp)