В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Описанию принципов работы GPS посвящено большое количество подробных и познавательных статей и книг, поэтому мы рассмотрим лишь общие понятия, а также базовые различия между GPS и ГЛОНАСС. Система спутниковой навигации состоит из орбитальной группировки (спутники), наземного (центры управления и слежения) и абонентского (приемники потребителей) сегментов.
Изначально планировалось, что спутниковая группировка GPS будет состоять из 24 спутников, распределенных по 4 на шести орбитах. Однако этого оказалось недостаточно для надежного покрытия критически важных регионов Земли. Кроме того, надо иметь спутники в резерве. Поэтому общее количество спутников увеличено до 32, и на некоторых орбитах вращается до 6 спутников. Спутники движутся на высоте около 20 000 км со скоростью 3000 м/с и совершают два оборота вокруг Земли за сутки.
Спутники ГЛОНАСС располагаются на трех орбитальных плоскостях, по 8 спутников в каждой, и теоретически орбитальная структура ГЛОНАСС обеспечивает более полное и надежное покрытие. К сожалению, на момент написания книги формирование орбитальной группировки ГЛОНАСС не было завершено и на орбите находилось 25 спутников, не все из которых введены в эксплуатацию. К тому же, четыре новых спутника были утрачены при неудачном запуске ракеты-носителя. Но работы по завершению группировки ведутся очень интенсивно, и есть надежда, что в ближайшие два-три года система будет полностью развернута.
GPS NAVSTAR использует кодовое разделение каналов с вещанием кодированных сигналов на нескольких частотах, а ГЛОНАСС — частотное. Но суммарная ширина спектра сигналов ГЛОНАСС даже меньше, чем у GPS, поэтому один и тот же радиочастотный тракт приемника может принимать сигналы обеих систем. Дальнейшее разделение сигналов спутников и выделение полезной информации производится методами цифровой обработки сигнала внутри абонентского приемника. Использование мультисистемных приемников существенно повышает качество навигации, особенно в сложной обстановке (городская застройка, лес, горы).
Принцип определения координат
Определение координат объекта производится путем измерения дальностей до спутников. Рассмотрим пример с тремя навигационными передатчиками А, В и С на плоскости (рис. 3.5).
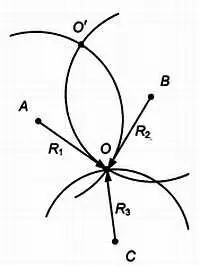
Рис. 3.5. Определение координат на плоскости дальномерным методом
Измерение расстояний RA и RB до передатчиков А и В дает нам две окружности положения с соответствующими радиусами. Объект может находиться как в точке О , так и в точке О' . Добавление третьего передатчика ликвидирует эту неоднозначность на плоскости.
Аналогично происходит определение местоположения в трехмерном пространстве, только вместо окружностей мы имеем пересекающиеся сферы местоположения, которые сложно изобразить на книжной иллюстрации. Постарайтесь представить картину мысленно. Пересечением двух сфер является окружность, на любой точке которой может находиться наш объект. Пересечение трех сфер дает нам пересечение трех окружностей положения в трехмерном пространстве , что порождает неоднозначность в виде двух точек положения. В ряде случаев одну из точек навигационный приемник может сразу исключить, если воспользоваться дополнительной информацией о положении: привязка к наземной станции навигации или сотовой связи, к точке доступа Wi-Fi, ранее сохраненные данные и т. д. Также очевидно, что объект заведомо не может находиться, например, на глубине 300 м под землей. Однако это частности, а в общем случае для определения координат объекта в трехмерном пространстве (ширина-долгота-высота) необходимы как минимум четыре спутника.
Пространственные координаты спутника известны с большой точностью. Чтобы вы оценили точность позиционирования спутников на орбите, отметим, что учитывается давление солнечного света на оболочку спутника, истечение газов наружу из материала оболочки, влияние гравитационного поля Луны и неоднородность гравитационного поля Земли.
Расстояние от спутника до объекта вычисляется умножением скорости света на время прохождения сигнала от спутника до приемника. Но скорость света в вакууме и атмосфере различается. Кроме того, при прохождении через тропосферу и ионосферу радиосигнал испытывает переменные задержки, величина которых зависит от текущего физического состояния верхних слоев атмосферы. Для компенсации переменных задержек применяется передача копии спутникового сигнала на второй частоте. Зависимость задержки от частоты хорошо изучена и точно известна. Но двухчастотные приемники очень дороги, сигнал на второй частоте зашифрован и доступ к его использованию лицензируется. Поэтому в гражданской практике двухчастотные приемники (не путайте с двухсистемными) практически не используются. Кроме атмосферных задержек на определение дальности влияют инструментальные задержки сигнала в цепях передатчика и приемника, ошибки часов спутника и приемника, а также релятивистский эффект, возникающий при движении спутника по орбите. Поэтому фактически приемник работает не с дальностями, а с псевдодальностями до спутников.
Для определения времени прохождения сигнала от спутника часы приемника должны быть очень точно синхронизированы с часами спутника, т. к. расхождение порядка 0,3·10 -6с дает погрешность 100 м. В общем случае вычислитель приемника решает систему уравнений, в которой четыре неизвестных: три пространственных координаты X, Y, Z и время t . Как известно, для нахождения однозначного решения системы уравнений, их должно быть на одно больше, чем неизвестных. Поэтому для точной синхронизации шкал времени нужны уже пять спутников, а не четыре. Разумеется, задача устранения погрешностей, связанных с переменными задержками, может решаться путем накопления измерений и статистической обработки на основе сигнала от четырех спутников. Но такой подход менее точен и требует существенно большего времени для накопления измерений.
Еще одной серьезной проблемой является прием отраженных сигналов в условиях городской застройки или сильно пересеченного рельефа местности. В некоторых случаях приемник может получать только отраженный сигнал. Наличие отражений приводит к ошибочному определению координат. Для выявления и отбраковки отраженных сигналов желательно, чтобы приемник принимал одновременно сигналы от шести спутников.
Итак, современные модули GPS, применяемые в квадрокоптерах, одновременно обрабатывают сигналы не более чем от шести спутников. Дальнейшее увеличение числа одновременно обрабатываемых спутников существенно усложняет и удорожает приемник, но не дает заметного увеличения точности. Даже если в зоне видимости находятся десять и более спутников, приемник в определенный момент времени будет работать только с шестью. Но наличие "запасных" спутников позволяет приемнику отвергать сигналы, которые он счел отраженными и недостоверными, а также динамически переключаться на сигнал спутников, имеющих более выгодное для навигации геометрическое расположение на орбите в текущий момент. Следовательно, наличие большого количества видимых спутников может улучшить качество услуги позиционирования, хотя и косвенным образом.
Читать дальшеИнтервал:
Закладка:









