В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Поскольку напряжение регулируется только за счет длительности активных импульсов, а все остальное время ток через силовой ключ регулятора не протекает, то потери энергии минимальны и КПД импульсного регулятора значительно выше, до 95 %.
В отличие от линейного стабилизатора, работающего только с понижением напряжения, импульсные стабилизаторы могут быть как понижающие (Step-Down), так и повышающие (Step-Up), а по типу схемы бестрансформаторные (Switched ВЕС) и трансформаторные (UBEC). Чаще используются бестрансформаторные понижающие преобразователи на ключевом элементе. Структурная схема такого преобразователя показана на рис. 2.29.
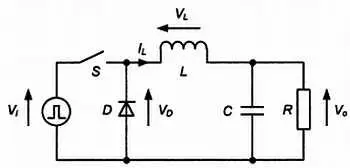
Рис. 2.29. Структурная схема понижающего преобразователя
Управляемый напряжением генератор V i вырабатывает импульсы переменной скважности, которые управляют ключом S . В качестве ключа обычно используются MOSFET-транзисторы с низким проходным сопротивлением канала, что снижает потери энергии на нагрев. Когда ключ замкнут, ток начинает протекать через накопительную цепь из дросселя L и конденсатора С , заряжая конденсатор. Напряжение на нагрузке R равно разности напряжения источника питания и ЭДС самоиндукции дросселя, ток через дроссель растет, как и напряжение на конденсаторе и нагрузке.
При размыкании ключа ток самоиндукции дросселя продолжает протекать через нагрузку в том же направлении через диод D , а также через нагрузку протекает ток разряда конденсатора. Далее цикл повторяется. Чем выше коэффициент заполнения импульсов, тем выше напряжение на конденсаторе и нагрузке. Генераторы импульсных преобразователей работают на высоких частотах, от сотен килогерц до единиц мегагерц, что позволяет снизить габариты накопительного дросселя и конденсатора.
Встроенная цепь обратной связи генератора отслеживает выходное напряжение и при падении напряжения на нагрузке увеличивает длительность импульсов, и наоборот. Преобразователь может быть как регулируемым, так и настроенным на заданное выходное напряжение.
Достоинства импульсных преобразователей:
• высокий КПД;
• широкий диапазон входных и выходных напряжений;
• возможность плавной регулировки напряжения.
Недостатки импульсных преобразователей надо обязательно иметь в виду.
• При пробое ключа в схеме преобразователя напряжение первичного источника оказывается полностью приложенным к нагрузке и, как правило, выводит ее из строя. Это, пожалуй, самый неприятный и опасный недостаток.
• Импульсные помехи для чувствительного оборудования. Но, как показала практика, рабочие частоты и их гармоники даже у самых дешевых преобразователей не мешают радиоприему и телеметрии на частоте 2,4 ГГц, а также работе GPS/ГЛОНАСС и незаметны на картинке видеокамеры. Низкочастотные каналы связи диапазона 40–70 МГц могут испытывать помехи от преобразователя.
• Более сложная конструкция, больше вес и габариты по сравнению с интегральным линейным стабилизатором.
Вы уже знаете, что регуляторы оборотов имеют функцию плавного отключения при разряде батареи ниже аварийного уровня. Эта функция спасает батарею от глубокого разряда, но способна, погубить квадрокоптер, поскольку от начала плавного снижения тяги до полной ее потери проходит не более 40 с. Этого достаточно, чтобы плавно посадить коптер, находящийся рядом, но вернуть его с дистанции в несколько сотен метров вы уже не успеете. Поэтому наличие индикатора разряда батареи критически валено для безопасных полетов.
Индикаторы разряда бывают двух видов: телеметрийный и звуковой. В варианте с телеметрией напряжение силовой батареи измеряется полетным контроллером или модулем телеметрии, и далее либо передается в общем потоке данных на приемную станцию для отображения на мониторе, либо накладывается на видеоизображение, принимаемое с бортовой камеры. Достоинствами такого метода является точность индикации, обычно до десятых долей вольта, и большая дальность действия, а также возможность приблизительно оценить оставшееся полетное время.
Но телеметрия используется не всегда. При полетах в пределах прямой видимости, когда сохраняется достаточная слышимость, можно (точнее, обязательно нужно!) использовать звуковой индикатор разряда батареи. При достижении порогового значения, но раньше, чем срабатывает отсечка регуляторов, индикатор подает прерывистый звуковой сигнал. Как правило, после этого в распоряжении оператора остается 1–2 минуты полетного времени, чтобы вернуть и посадить коптер.
На индикаторе лучше не экономить и приобрести такой вариант, который подключается к балансирному разъему и контролирует каждую ячейку в отдельности, а также миганием светодиода показывает, какая из ячеек разрядилась раньше (рис. 2.30). Это поможет избежать ситуации, когда одна из ячеек раньше других разрядилась до критического значения, тогда как напряжение батареи в целом остается в пределах нормы. Индикатор лучше всего монтировать в задней части рамы, излучателем в сторону оператора. Желательно выбирать индикатор со специальным громким излучателем.
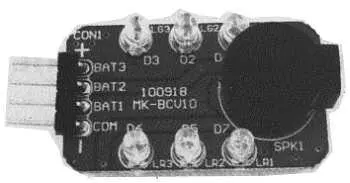
Рис. 2.30. Индикатор разряда батареи с раздельным контролем ячеек
Глава 3
Дополнительные компоненты квадрокоптера
Многие владельцы квадрокоптеров не согласятся с тем, что видеооборудование квадрокоптера отнесено ко вторичным аксессуарам, поскольку приобретают или строят коптеры именно ради полетов по видеокамере и/или высотной фотовидеосъемки. Простые полеты в пределах визуального контроля быстро наскучивают, зато полеты с видом "своими глазами" по FPV ( Flight Per Video или First Person View ) с высоты птичьего полета дают неповторимые ощущения. Оборудование для таких полетов можно дорабатывать почти бесконечно, что само по себе очень интересно.
Видеооборудование коптера в общем случае состоит из следующих компонентов:
• видеокамеры, курсовая и основная;
• видеокоммутатор;
• стабилизированный подвес камеры;
• модуль наложения информации на изображение (OSD);
• видеопередатчик;
• всенаправленная антенна.
• источник питания видеооборудования.
Наземная часть видеоканала также состоит из нескольких компонентов:
• видеоприемник;
• антенны, всенаправленная и направленная;
• система управления положением антенны (трекер);
Читать дальшеИнтервал:
Закладка:









