В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
От качества источника бортового питания (ВЕС, Battery Elimination Circuit ) напрямую зависит безопасность полетов, поскольку проблемы с источником могут стать причиной непонятных эпизодических сбоев в работе бортовой электроники, вплоть до внезапной перезагрузки полетного контроллера в воздухе. Поэтому источники бортового питания заслуживают отдельного развернутого обсуждения.
Некоторые дополнительные электронные модули, такие как видеокамера, видеопередатчик или передатчик сигнала телеметрии, могут питаться от напряжения +12 В и допускают прямое подключение к литий-полимерной батарее с напряжением 3S.
В большинстве случаев для питания бортового оборудования коптера (полетный контроллер, радиоприемник, навигация и т. д.) требуется напряжение +5 В. Это исторически сложившееся напряжение питания еще с тех времен, когда стандартная цифровая электроника широкого применения была пятивольтовой.
Многие современные интегральные компоненты работают при напряжении питания 3,3 В. В этом случае на плате устройства, как правило, присутствует дополнительная микросхема интегрального стабилизатора, преобразующего 5 В в 3,3 В.
Внимание!
Надо быть особенно аккуратным и внимательным при использовании в своих разработках миниатюрных модулей GPS, Bluetooth или мини-видеокамер. Зачастую эти модули не содержат встроенный источник 3,3 В и должны быть смонтированы на материнской плате, где такой источник установлен. Подача напряжения 5 В почти наверняка выведет низковольтный модуль из строя. И наоборот, при питании пятивольтового модуля от источника 3,3 В он будет либо работать очень нестабильно, либо не будет работать вовсе. Причем иногда модули выпускаются в двух вариантах питания, а недобросовестные китайские продавцы не обращают на это внимание. Поэтому перед первым подключением питания тщательно убедитесь в том, на какое рабочее напряжение рассчитан модуль. Допускается напрямую питать 3,3-вольтовые устройства от одноячеечной литий-полимерной батареи с рабочим напряжением 3,60-3,72 В.
Источники бортового питания представляют собой стабилизатор напряжения и бывают двух видов: последовательные линейные и импульсные .
Последовательный линейный стабилизатор
Последовательный линейный стабилизатор включается в разрыв питающей цепи (рис. 2.28).
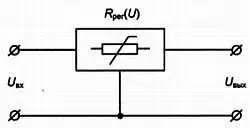
Рис. 2.28. Схема включения линейного стабилизатора
Падение напряжения происходит за счет внутреннего омического сопротивления стабилизатора, поэтому значительная часть драгоценной электрической энергии батареи превращается в тепло и рассеивается в окружающем пространстве. По сути, линейный стабилизатор представляет собой управляемое сопротивление с обратной связью, реагирующее на колебания напряжения на входе и нагрузке. В соответствии с формулой WR= URI, чем больше падение напряжения на сопротивлении и ток в цепи нагрузки, тем больше тепла выделяется на сопротивлении. Очевидно, что при питании пятивольтовой нагрузки от батареи напряжением 12 В на регуляторе падает 7 В, т. е. больше половины. Соответственно, больше половины потребляемой энергии будет напрасно рассеиваться на стабилизаторе в виде тепла. В этом и состоит главный недостаток линейных стабилизаторов — низкий КПД.
Достоинствами линейного стабилизатора являются простота конструкции (в большинстве случаев это микросхема с тремя выводами), малый вес и габариты, дешевизна, универсальность, отсутствие внешних компонентов схемы. Большинство современных микросхем стабилизаторов оснащены встроенной защитой от короткого замыкания и перегрева, иногда от переполюсовки. Поэтому линейные интегральные стабилизаторы по-прежнему широко применяются и во многих случаях незаменимы, поскольку для миниатюрных и маломощных устройств использование более сложных стабилизаторов технически и экономически нецелесообразно. Однако с ростом потребляемого тока или разности входного и выходного напряжений эффективность линейных стабилизаторов катастрофически снижается.
Традиционно принято встраивать интегральные линейные стабилизаторы на плату регулятора оборотов бесколлекторного двигателя. Эта традиция пошла от самолетной практики, для упрощения конструкции и экономии места. В большинство регуляторов оборотов для мультикоптеров их также продолжают встраивать, в результате мы по умолчанию имеем на борту четыре одинаковых источника +5 В, по одному от каждого из регуляторов.
К сожалению, использование этих источников для питания бортовой аппаратуры не всегда приемлемо. Во-первых, регулятор оборотов мотора является источником импульсных помех, проникающих за источник питания. И если для питания полетного контроллера это не критично, то при питании видеокамеры или видеопередатчика эти помехи могут быть заметны на изображении и в канале звука. Во-вторых, регуляторы оборотов и без того нагреваются в полете, иногда довольно сильно. И если нагрузить до предела один из встроенных стабилизаторов, то соответствующий регулятор может перегреться.
Допускается соединять выходы всех встроенных стабилизаторов +5 В параллельно, тем самым равномерно распределяя нагрузку между ними. Это допустимо, если нужно питать только полетный контроллер и приемник. Видеокамеру и аппаратуру видео- и аудиоканала все-таки лучше питать от независимого стабилизатора напряжения, даже если он подключен к той же самой силовой батарее.
Примечание
Еще один важный нюанс: некоторые полетные контроллеры требуют повышенного напряжения питания, не ниже 5,25 В (но не выше 5,6 В) из-за того, что напряжение питания падает на последовательно включенных защитных диодах схемы контроллера. Но на выходе ВЕС, встроенных в регуляторы оборотов, под нагрузкой чаще всего получается 4,85-4,90 В. При таком напряжении питания, например, полетные контроллеры MultiWii AIOP v.2 начинают непредсказуемо сбоить и зависать. Некоторые производители специализированных мультикоптерных регуляторов оборотов учли эту проблему и выпускают регуляторы с повышенным выходным напряжением встроенного ВЕС.
Если у ваших регуляторов оборотов заниженное напряжение источников +5 В, питайте от них сервомашинки, подсветку и т. д., а для питания контроллера используйте отдельный источник.
Импульсные стабилизаторы-преобразователи
В импульсных стабилизаторах постоянное входное напряжение при помощи встроенного генератора и силового ключа преобразуется в импульсы высокой частоты с регулируемой длительностью при неизменной частоте, отношение периода повторения электрических импульсов к их длительности называется скважностью S, а обратная величина 1/S — коэффициентом заполнения. Чем выше коэффициент заполнения, тем больше количество энергии, передаваемой со входа стабилизатора на выход, и тем выше напряжение на выходном каскаде.
Читать дальшеИнтервал:
Закладка:









