В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Подбор оптимальной винтомоторной пары — это, по сути, параметрическая оптимизация системы, где в качестве параметров участвуют также полетный вес системы в сборе, максимальная токоотдача, вес батареи и т. д. Для удобства оптимизации разработаны специальные программы и онлайн-приложения, о которых мы поговорим позднее.
При подборе винтов следует учитывать не только развиваемую тягу, но и способность лопастей винта эту тягу удержать не деформируясь. Лопасти дешевых пластиковых винтов выгибаются под нагрузкой, теряя оптимальный профиль и КПД. Поэтому многие моделисты предпочитают использовать более дорогие, но прочные и легкие карбоновые винты. Кроме того, пластиковые винты склонны к флаттеру — самовозбуждающимся колебаниям лопастей винта, которые происходят за счет энергии воздушного потока. Внешне флаттер выражается в появлении характерного "грязного" жужжащего звука при вращении винта и визуальном размытии краев плоскости вращения, если смотреть на вращающийся винт сбоку. Однако нужно уметь отличать флаттер от вибрации несбалансированной винтомоторной пары. Методы балансировки мы обсудим в части II книги.
Надо особо отметить, что звук работающей винтомоторной пары для моделиста очень важен и информативен . Опытному моделисту он без приборов говорит о многом: обороты, нагрузка на двигатель, качество балансировки, появление флаттера на определенных оборотах, сбои в работе регулятора оборотов. Поэтому многие пилоты, практикующие полеты по видеокамере (FPV), не ограничиваются каналом видео и добавляют канал звука, чтобы слышать двигатели в работе.
Как мы уже говорили ранее, регуляторы оборотов бесколлекторного двигателя представляют собой самостоятельное устройство на основе микроконтроллера. Несмотря на внешнюю простоту решаемой задачи — коммутировать ток в обмотках бесколлекторного двигателя — микроконтроллер регулятора работает по весьма сложному алгоритму. Современный регулятор должен:
• автоматически определять величину напряжения силовой батареи;
• иметь защиту от перегрузки по току;
• иметь защиту от запуска при механически заблокированном двигателе;
• автоматически подстраиваться под количество полюсов конкретного двигателя;
• иметь защиту от срыва синхронизации фазы.
Последние два пункта, пожалуй, следует раскрыть подробнее. В зависимости от конструкции, двигатель может содержать различное количество полюсов катушек статора и магнитов ротора. Коммутация тока в обмотках должна происходить синхронно (в фазе) с перемещением магнитов ротора, как бы "подгоняя" их. Если алгоритм коммутации не соответствует числу полюсов или регулятор пытается придать двигателю ускорение, которое двигатель не может развить по причине слабых магнитов или неудачной конструкции, происходит срыв синхронизации, "проскок" фазы коммутации обмоток статора относительно реального положения магнитов ротора. При срыве синхронизации равномерный высокочастотный свист работающего двигателя нарушается щелчками или хрипением, иногда можно визуально наблюдать рывки во вращении пропеллера. Срыв синхронизации может произойти также при просадке силового питающего напряжения в момент пиковой нагрузки.
Кроме вышеупомянутых опций, регуляторы для квадрокоптеров должны обеспечивать особо острый отклик моторов на изменения управляющих сигналов, поступающих с контроллера. От этого напрямую зависит стабильность и управляемость мультикоптера. С другой стороны, квадрокоптеру не нужны самолетные режимы плавного разгона и торможения пропеллера. Напротив, такие режимы вредны. Поэтому для использования на квадрокоптерах разработаны специальные регуляторы. Точнее, разработаны специальные прошивки для микроконтроллера в регуляторе.
Из открытых проектов прошивок наиболее популярны SimonK и BLHeli. При желании и наличии опыта можно самостоятельно прошить подходящие регуляторы, однако в настоящее время можно без труда приобрести готовые, прошитые нужной прошивкой контроллеры (рис. 2.21). Это существенно сэкономит ваше время, а в случае неудачной прошивки и деньги.
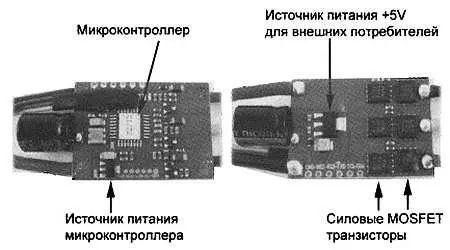
Рис. 2.21. Регулятор оборотов бесколлекторного двигателя
Регуляторы обычно крепят снаружи на лучи рамы, обеспечивая им хороший обдув. Отдельно следует упомянуть специальные комбо-регуляторы для квадрокоптеров, когда четыре регулятора и источник питания бортовой электроники смонтированы в одном корпусе (рис. 2.22). По сути, это четыре одинаковых независимых регулятора, которые объединены лишь общей печатной платой.
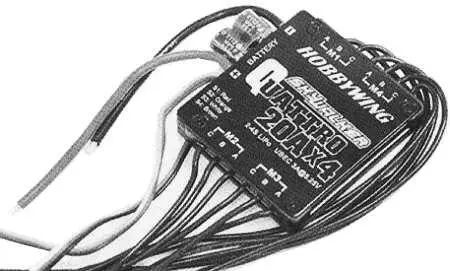
Рис. 2.22. Комбинированный четырехканальный регулятор
Достоинствами такой конструкции являются отсутствие разветвителя силового питания и короткие силовые провода, что уменьшает магнитные наводки на компас, а также простота и эстетичность монтажа. Но есть и очень серьезный недостаток, перечеркивающий достоинства: невозможность замены сгоревшего регулятора. При аварии с замыканием проводки в цепи мотора регулятор зачастую перегорает, и для быстрого ремонта достаточно иметь запасной регулятор, а перегоревший впоследствии можно не спеша наладить или приобрести еще один. В случае комбо-регулятора придется либо ремонтировать неисправный канал, что далеко не всегда осуществимо, либо покупать новый комбо-регулятор целиком.
Суммарный пиковый ток, потребляемый моторами даже среднего мультикоптера, может достигать 70 А. Но при этом батарея должна быть как можно легче и иметь емкость, достаточную для полета как минимум 10 минут. Этим противоречивым требованиям лучше всего соответствуют литиевые аккумуляторы.
Существуют две основные модификации литиевых аккумуляторов: литий-ионные (Li-Ion) и литий-полимерные (LiPo, Li-Pol), отличающиеся типом электролита.
В литий-ионном аккумуляторе используется гелевый электролит, а в литий-полимерном— специальный полимер, насыщенный литийсодержащим раствором.
В моделизме используются именно литий-полимерные батареи, т. к. они способны отдавать больший рабочий ток, что в нашем случае критически важно. Другим весомым преимуществом литий-полимерных батарей является отсутствие жидкого электролита и возможность изготавливать более прочные плоские аккумуляторы произвольного размера. В мобильных телефонах, планшетах, фотоаппаратах и прочей бытовой электронике также используются литий-полимерные батареи, но они не рассчитаны на большой рабочий ток, поэтому от идеи использовать их в моделизме следует сразу отказаться. В остальном принципы работы, свойства и правила эксплуатации различных версий литиевых аккумуляторов не различаются.
Читать дальшеИнтервал:
Закладка:









