В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Следует сразу заметить, что управлять самодельным коптером при помощи сенсорного экрана, особенно с недорогим телефоном низкого качества, довольно сложно. Смартфон не заменит полностью пульт радиоуправления, прежде всего, потому что Bluetooth имеет очень ограниченный радиус действия. Радиомодем работает на большом расстоянии, но имеет ограничения по скорости передачи данных.
С другой стороны, при помощи смартфона можно провести испытательные взлеты и поверить основные настройки контроллера и функционирование узлов, если пульт еще не куплен или задержался в дороге. Простые тренировочные полеты и висение также вполне доступны при управлении через смартфон или планшет.
Благодаря наличию в современных гаджетах акселерометра, доступна такая интересная функция, как управление коптером при помощи наклона гаджета в нужную сторону. Такой способ управления интуитивно понятен и эффектно выглядит со стороны, но, к сожалению, быстро вырабатывает вредную привычку непроизвольно наклонять пульт управления. При переходе к обычному пульту управления от этой привычки трудно избавиться.
Установка и настройка программы EZ-GUI Ground Station описана в одноименном подразделе раздела " Программы для мобильных устройств " главы 5 . Далее, должно быть настроено беспроводное соединение с полетным контроллером по Bluetooth или радиомодему. Подключение беспроводного оборудования описано в главе 6 . Как показали испытания, проведенные автором, скорости радиомодема 57 600 бод недостаточно, возникают "рывки" сигнала управления, поэтому в данном случае модем надо настроить на скорость 115 200 бод. Это сокращает максимальную дальность действия, но она остается вполне достаточной. Также установлено, что с некоторыми моделями мобильных гаджетов управление через радиомодем работает нестабильно. В частности, возникают периодические скачки оборотов двигателей. При использовании Bluetooth сбои не были замечены.
Запустите EZ-GUI Ground Station и перейдите в раздел Конфигурации | Расширенные | Model Control. Рабочий экран показан на рис. П1.1. Он по умолчанию находится в вертикальной ориентации и не разворачивается. Четыре пункта выбора опций из ниспадающих списков в верхней строке предназначены для симуляции тумблеров AUX1-AUX4 на пульте и имитируют одно из трех значений управляющего сигнала: низкий, средний и высокий. Выбирая нужные значения в соответствии с конфигурацией прошивки контроллера, можно переключать режимы точно так же, как это делается с пульта. Органы управления расположены таким образом, что горизонтальный движок предназначен для управления по оси направления YAW, а движок управления газом расположен справа от джойстика управления кренами, т. е. соответствует варианту пульта Mode 1. Такое расположение движка газа неудобно для тех, кто привык к пульту Mode 2, а также вырабатывает неправильную моторику у тех, кто еще не начал пользоваться пультом.
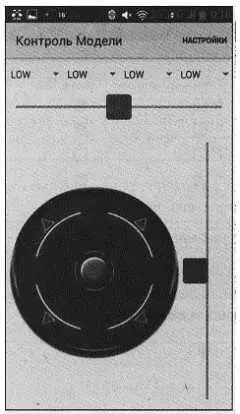
Рис. П1.1. Главный экран управления коптером программы EZ-GUI Ground Station
К счастью, назначение органов управления можно переназначить в настройках. Для этого нажмите опцию Настройкив правом верхнем углу экрана. Показанный на рис. П1.2 вариант настроек соответствует горизонтальному положению гаджета, когда короткий слайдер оказывается слева от джойстика и соответствует движку газа, а длинный слайдер сверху и соответствует управлению по оси направления YAW.
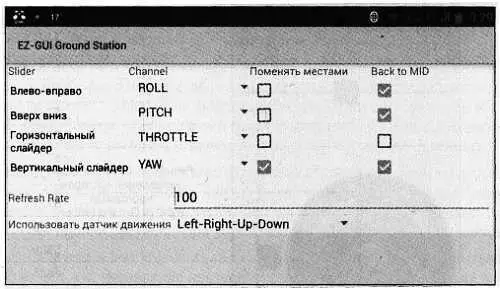
Рис. П1.2. Экран настроек для управления коптером
Как и устроено в настоящем пульте, положение движка газа фиксируется, а остальные движки автоматически возвращаются в среднее положение. Кроме того, включен режим управления положением коптера при помощи наклонов гаджета Использовать датчик движения — Left-Right-Up-Down. При таких настройках активация моторов происходит обычным способом: поместите движок газа в минимальное положение, затем переместите движок YAW в крайнее правое положение. Для отключения моторов переместите движок YAW в крайнее левое положение при минимальном газе.
Внимание!
Все настройки и проверки проводите только при снятых воздушных винтах!
Перед использованием функции управления наклоном может потребоваться калибровка встроенного акселерометра телефона или планшета. Если функция калибровки не предусмотрена в прошивке, скачайте на Google Play приложение Bubble level и откалибруйте акселерометры, поочередно помещая гаджет на образцовую горизонтальную поверхность короткой стороной, длинной стороной и задней крышкой, каждый раз нажимая кнопку Менюи запуская калибровку.
2. Сетка частот каналов видеотракта
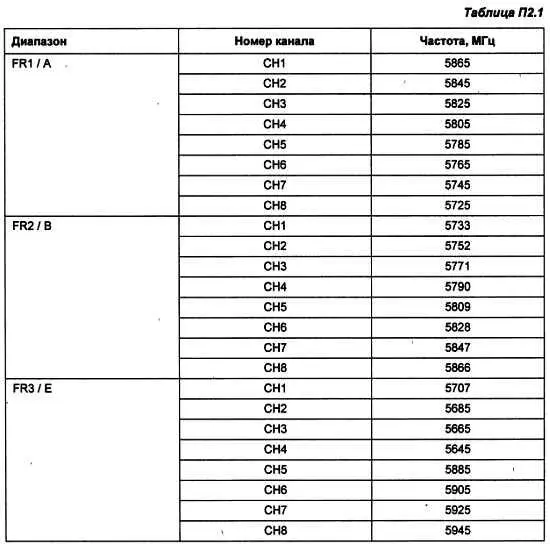
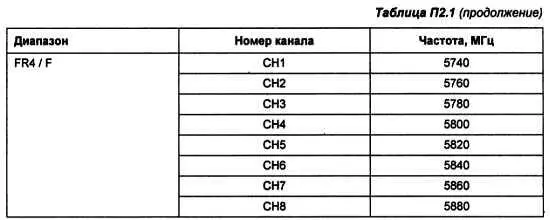
Обратите внимание, что в связи с особенностями работы синтезатора частоты в некоторых поддиапазонах физические частоты каналов не идут подряд.
3. Команды управления и конфигурирования при помощи рукояток пульта

4. Описание электронного архива
По ссылке ftp://ftp.bhv.ru/9785977535861.zipможно скачать электронный архив с чертежами простой платы квадрокоптера, утилитами для настройки и файлами, необходимыми для изготовления самодельного цветного дисплея. Эта ссылка доступна также со страницы книги на сайте wvnv.bhv.ru.
Распаковав архив в любую рабочую папку, вы получите структуру папок, приведенную в табл. П4.1.
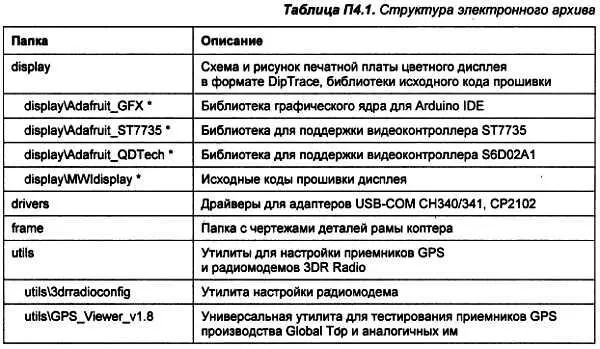
Внимание!
Папки, помеченные символом *, переименовывать нельзя.
* * *
Интервал:
Закладка:









