В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
К сожалению, новая среда разработки Arduino IDE 1.6.1 выдает ошибку компиляции исходного кода, поэтому будем использовать Arduino IDE 1.0.5. В меню Сервис | Платавыберите Arduino Pro or Pro Mini (5V, 16MHz) with ATmega328, затем через меню Сервис | Портукажите порт, к которому через адаптер подключен модуль. Теперь, как и в случае с полетным контроллером, перед записью новой прошивки обязательно следует очистить энергонезависимую память EEPROM. В меню Файл | Примеры | EEPROMвыберите пример "eepromclear". В строке
for (int i = 0; i < 512; i++)
исправьте параметр 512 на 1024, это объем памяти EEPROM микроконтроллера ATmega328. Скомпилируйте программу и запишите ее в микроконтроллер модуля OSD нажатием на круглую кнопку со стрелкой вправо. Дождитесь зажигания светодиода, расположенного над микроконтроллером. Теперь память EEPROM очищена и можно записывать основную прошивку.
Откройте, в Arduino IDE файл KV_Team_OSD.ino и скомпилируйте проект с записью прошивки в модуль. Если компиляция и запись прошли успешно, сразу после перезагрузки вы, скорее всего, увидите на экране беспорядочный набор символов, потому что таблица знакогенератора не соответствует версии прошивки. Для записи новой таблицы символов и дальнейшей настройки воспользуемся утилитой-конфигуратором.
В папке KV_Team_GUI выберите, подпапку, соответствующую операционной системе вашего компьютера, и запустите конфигуратор (рис. 6.41).
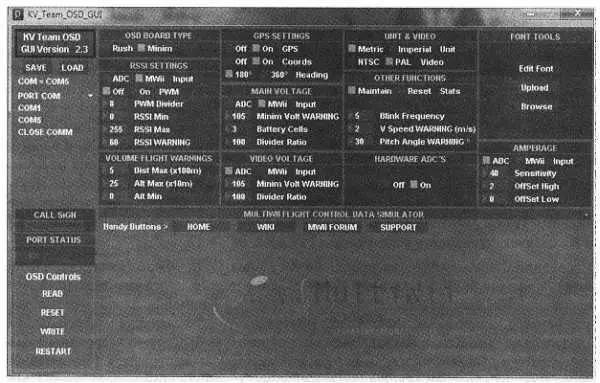
Рис. 6.41. Конфигуратор прошивки KV_Team_OSD
В левой колонке выберите нужный порт, соединение на скорости 115 200 бод будет установлено автоматически. Теперь в секции FONT TOOLSнажмите кнопку Browseдля выбора шрифта. Файлы шрифтов хранятся в папке Data и имеют расширение mem. На выбор предлагаются два варианта: крупный и мелкий шрифт.
Какой из них выбрать — зависит от конкретного монитора, поэтому проверьте оба размера. Выбрав шрифт, дождитесь всплывающего окна с уведомлением, что шрифт загружен в буфер конфигуратора, и нажмите кнопку Upload. Через несколько секунд шрифт будет загружен в знакогенератор микросхемы МАХ7456. Если после окончания загрузки не произошел сброс и перезапуск модуля, нажмите кнопку сброса на плате. Теперь на экране появится заставка MultiWii и рабочий экран.
Можно приступать к конфигурированию отображаемых данных. Отметим, что запись прошивки, шрифта и все настройки можно выполнять при подключенном мониторе и визуально наблюдать все изменения в реальном времени.
Вы можете самостоятельно редактировать символы знакогенератора по своему усмотрению. Для этого в конфигуратор встроен простой пиксельный редактор символов, который вызывается кнопкой Edit Font.
Рассмотрим детально секции конфигуратора, но перед этим следует пояснить, что для измерения напряжения батареи, потребляемого тока и уровня сигнала радиоуправления можно использовать как аналоговые входы полетного контроллера, с передачей обработанных значений в потоке данных, так и входы контроллера модуля OSD. В этой главе далее будет рассказано, как подключить аналоговые сигналы к модулю.
CALL SIGN— здесь вы можете ввести условное имя своего коптера, если их несколько. В вашем распоряжении 10 латинских символов. Имя будет появляться на заставке при включении.
OSD BOARD TYPE— конфигуратор может работать с платами двух проектов: Rushduino и MinimOSD. Различие этих плат только в выводах контроллера, управляющих видеомиксером МАХ7456.
RSSI SETTINGS— секция контроля за уровнем сигнала на антенном входе приемника. Если приемник не имеет выхода RSSI, эту секцию можно пропустить. Флажок ADC/MWii Inputпозволяет выбрать внутренний АЦП модуля или аналоговый вход полетного контроллера с прошивкой MultiWii. Переключатель Off/On PWMпредназначен для выбора типа сигнала RSSI. В зависимости от приемника это может быть либо аналоговый уровень, либо широтна-модулированный сигнал, где длительность импульса пропорциональна уровню сигнала. Параметр PWM Dividerтребует настройки под конкретный приемник. Разработчик проекта не рекомендует применять простой метод, когда передатчик расположен рядом с приемником, и при включенном передатчике уровень сигнала принимается за 100 %, а при выволоченном 0 %. Рекомендуется минимальным уровнем считать сигнал с запасом 15–20 % от реального сигнала. RSSI WARNINGзадает уровень сигнала, при котором срабатывает предупреждение.
VOLUME FLIGHT WARNINGS— предельные параметры полета, при которых будет срабатывать предупреждение. Предельное удаление Dist Maxможет быть задано в метрах от 0 до 25 000. По умолчанию задано 5∙100 = 500 м. Максимальная высота Alt Maxзадается в метрах, умноженных на 10. По умолчанию задано 25∙10 = 250 м. Минимальная высота полета задается в диапазоне 0-50 м. Если в этом поле установлено значение, большее ноля, то аварийная индикация сможет сработать только спустя 60 с полета. Этот интервал времени необходим для предотвращения ложных срабатываний при наборе высоты. Сигнализация максимальной высоты готова к срабатыванию сразу после взлета.
GPS SETTINGS— отображение информации GPS. Можно полностью выключить отображение переключателем Оff/Оn GPSили убрать с экрана только координаты переключателем Оff/Оn Coords. Переключатель 180°/360° Headingменяет вид компаса.
МАIN VOLTAGE— индикация напряжения силовой батареи. По аналогии со входом RSSI, переключатель ADC/MWii Inputвыбирает источник информации о напряжении. Минимальное напряжение Minim Volt WARNINGотображается без десятичной точки, т. е. значение 105 соответствует напряжению 10,5 В. Параметр Divider Ratioиспользуется для точной подстройки показаний под реальное напряжение батареи и действует только при использовании встроенного АЦП модуля (ADC).
VIDEO VOLTAGE— индикация напряжения батареи бортового видеопередатчика. Обычно видеокамеру и видеопередатчик питают от отдельной батареи. Модуль OSD может питаться:
• полностью от разъема порта полетного контроллера;
• полностью от видеобатареи, через разъем для подключения видео и встроенный импульсный источник;
• цифровая часть — от разъема порта, аналоговая — от видеобатареи через разъем видео.
UNIT & VIDEO— единицы измерения и система видео. По умолчанию установлены метрическая система и PAL, поэтому менять ничего не надо.
OTHER FUNCTIONS— здесь находятся настройки, для которых нет отдельной секции. Если вы хотите, чтобы при коротком перерыве между полетами, когда вы не отключаете питание, сохранялась статистика полета (время полета, потребленный ток, максимальная достигнутая дистанция и т. д.), то выберите опцию Maintain. В противном случае статистика будет обнуляться при каждом отключении моторов.
Читать дальшеИнтервал:
Закладка:









