В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Покупка 32-канального приемника RC832 (рис. 6.35) также снимает все проблемы совместимости частот с аппаратурой разных марок.
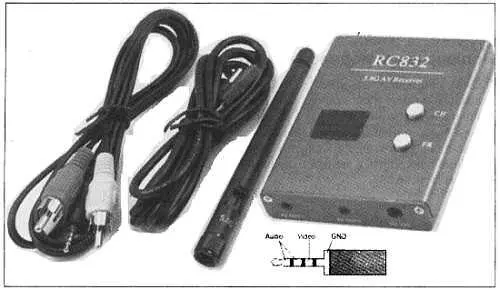
Рис. 6.35. Приемник RC832и назначение выводов штыревого разъема
У приемника два комбинированных аудио/видеовыхода, к одному подключается монитор или видеоочки, ко второму можно подключить любое устройство для записи видео. Для подключения потребуется миниатюрный штыревой разъем диаметром 2,5 мм. Такие разъемы встречаются в гарнитурах некоторых мобильных телефонов, обычно Nokia. Подойдет как трех-, так и четырехконтактный разъем. Поэтому для подключения видеоочков к приемнику можно купить в салоне сотовой связи переходник для наушников "штекер 2,5 — гнездо 3,5" или недорогую гарнитуру и отрезать от нее разъем.
Видеоочки и монитор
Если вы используете внешний независимый видеоприемник, то к нему можно подключить любые видеоочки, предназначенные для видеоигр или просмотра видео.
Следует обратить внимание на совпадение форматов изображения (4:3 или 16:9) камеры и очков. Самым простым и доступным по стоимости вариантом для новичков являются видеоочки Quanum, которые можно приобрести в виде набора для самостоятельной сборки. Они состоят из пенопластового корпуса, монитора и линзы Френеля, которая позволяет смотреть на монитор с расстояния в несколько сантиметров. Линз в наборе несколько, под разную остроту зрения. Важным достоинством монитора является то, что он не отключается в "синий экран" при пропадании сигнала.
Отдельно следует упомянуть полный набор начального уровня "Quanum + SkyZone", который состоит из очков-монитора, передатчика TS5823, приемника RC832, пары антенн с круговой поляризацией, миниатюрной камеры Sony и комплекта соединительных проводов. Причем стоимость этого набора заметно ниже, чем компонентов по отдельности. Вам потребуется докупить лишь подвес на сервомашинках, как на рис. 6.31. Набор можно смонтировать на коптере практически без применения пайки. Очки имеют довольно неуклюжий дизайн и примитивную конструкцию, зато являются безусловным лидером по соотношению "цена/качество". Впоследствии, приобретя себе более дорогие видеоочки, вы можете использовать "Quanum" для демонстрации полетов с видом "из кабины пилота" своим друзьям и близким.
В том случае, если вы предпочитаете использовать монитор, обратите внимание на модель Fieldview 777. Мониторы этой марки бывают как одиночные, так и со встроенными 32-канальным приемником на 5,8 ГГц и видеорекордером. Данные мониторы также не отключаются при потере сигнала.
Подключение подвеса к контроллеру
Прежде, чем приступать к настройке параметров управления подвесом, его нужно правильно собрать и смонтировать на раму квадрокоптера. При сборке валы сервомашинок необходимо поставить в среднее положение и собрать подвес так, чтобы камера была направлена прямо вперед по курсу и под углом примерно 45° вниз от горизонтали. Небольшие отклонения будут исправлены при настройке. Подвес необходимо прикрепить к виброизолированной площадке, подвешенной на 4–6 амортизаторах (рис. 6.36).
Рис. 6.36. Пример крепления подвеса к виброизолирующему основанию
Простой подвес на сервомашинках подключается к контроллеру с минимальными правками в прошивке. Достаточно в секции cam stabilisation найти и раскомментировать строку:
#define SERVO_TILT
Предыдущая строка //#define SERVO_MIX_TILT предназначена для подвесов другого типа, с другой конструкцией механики.
После записи прошивки в контроллер в конфигураторах MultiWii WinGUI и MultiWiiConf появится новая опция CAMSTAB. Ее, как и любую другую опцию, можно активировать по одному из каналов AUX1-AUX4 или включить постоянно, поставив галочки для всех трех значений любого канала AUX одновременно. Сохраните настройки в конфигураторе. Подключите сервомашинку, отвечающую за курсовое положение, к разъему ROLL (45), а за отклонение вверх-вниз — к разъему PITCH (44). Теперь, если начать наклонять раму коптера в стороны, подвес будет стараться сохранить исходное положение камеры в пространстве. Не забывайте, что на трехрядную гребенку разъема должно поступать питание +5 В, поэтому при питании через провод USB сервомашинки работать не будут.
По умолчанию в прошивке уже заданы параметры, при которых подвес достаточно точно работает с недорогими сервомашинками TG9 и НХТ900. Но наверняка исходное положение камеры будет выставлено неточно, а при кренах рамы компенсация недостаточно велика либо чрезмерна. Для устранения недочетов нужно произвести точную настройку параметров. Это как раз тот случай, когда произвести настройку при помощи мобильного приложения EZ-GUI Ground Station намного проще, чем при помощи стационарного компьютера. Тем не менее, рассмотрим оба варианта.
Настройка при помощи EZ-GUI Ground Station
Запустите приложение EZ-GUI Ground Station и установите соединение с мобильным устройством одним из описанных выше способов: через адаптер Bluetooth или радиомодем. Если опция CAMSTABеще не активирована, войдите в экран Настройки | AUX, отметьте нужные флажки и сохраните в память контроллера.
Затем на экране Настройкинажмите кнопку СЕРВЫ(рис. 6.37).
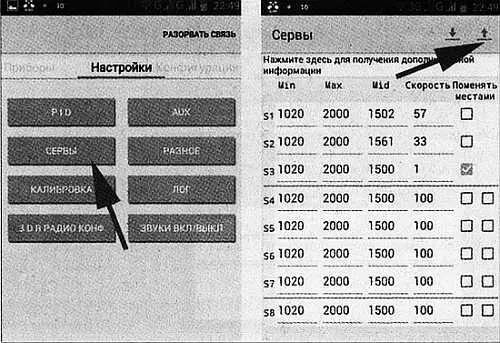
Рис. 6.37. Меню настройки подвеса в EZ-GUI Ground Station
Из контроллера автоматически прочитаются текущие настройки, а именно: минимальное и максимальное значение управляющего сигнала, значение для среднего положения и коэффициент реакции. Чем он больше, тем сильнее реакция подвеса на отклонение рамы. Отрицательное значение коэффициента инвертирует направление отклонения. При настройке следует добиваться того, чтобы при отклонениях рамы угол наклона камеры практически не менялся.
Крайние значения Minи Махнеобходимо уменьшать в том случае, если при максимальных отклонениях подвеса камера во что-то упирается. Значение среднего положения Midиспользуется не только для регулировки нейтрального положения подвеса. В окне настройки этого параметра можно выбрать, через какой канал радиоуправления мы можем вручную управлять положением камеры. По умолчанию стоит прочерк, т. е. подвес работает в полностью автоматическом режиме и стабилизируется относительно нейтрального положения.
Но вы можете захотеть управлять камерой вручную, через каналы AUX. Ведь на пульте этим каналам можно назначить не только тумблеры, но и переменные резисторы. В этом случае при наличии свободных каналов вы можете манипулировать камерой вправо-влево и вверх-вниз, либо по одной из осей. Подвес будет стабилизироваться относительно текущего положения камеры. Новые значения отправляют в контроллер кнопкой "вверх" и сразу после этого они начинают действовать.
Читать дальшеИнтервал:
Закладка:









