В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Примечание
В некоторых случаях в модуле дисплея может быть установлен драйвер Samsung S6D02A1. К сожалению, по внешнему виду модуля это невозможно распознать, а продавцы заранее не предупреждают. Поэтому, если правильно собранный дисплей не подает признаков жизни, необходимо установить библиотеку Adafruit_QDTech и внести исправления в прошивку.
Настройка прошивки
По умолчанию прошивка готова к использованию без каких-либо изменений. Тем не менее, при желании пользователь может настроить под себя содержимое выводимых данных и их размещение на экране, даже не имея навыков программирования.
Вывод данных разбит на страницы. За формирование каждой страницы отвечает отдельный файл page1.ino, page2.ino и т. д. Всего страниц семь. Строка главного файла программы
#define START_PAGE 1
задает стартовую страницу при включении дисплея. Вы можете указать здесь любой другой номер из числа доступных.
#define TOTAL_PAGE 7
задает общее количество страниц. После достижения этого числа происходит возврат к первой странице, т. е. страницы переключаются по кругу. Следующий фрагмент программы задает порядок следования страниц:
case 1: show_1(); break; //STATUS
case 2: show_2(); break; //RADIO
case 3: show_3(); break; //ACTIVE MODE
case 4: show_4(); break; //ACTIVE GPS
case 5: show_5(); break; //MOTORS
case 6: show_6(); break; //SERVOS
case 7: show_7(); break; //SENSORS
Здесь case 1, case 2: и т. д. — это порядковый номер отображаемой страницы.
Например, если вы напишете
case 1: show_4(); break; //GPS
…
case 4: show_1(); break; //STATUS
…
то отображаемые страницы 1 (STATUS) и 4 (GPS) поменяются местами при отображении, и при включении питания первым будет отображаться статус GPS.
В файле screenmap.h указаны опорные координаты каждой надписи на каждой странице. Меняя эти координаты по своему усмотрению, вы можете переставлять на страницах данные и подписи к ним. На экране дисплея нулевая точка координат находится слева вверху. То есть, значения по оси х отсчитываются как обычно, слева направо. Но значения по оси у отсчитываются сверху вниз.
Страницы перелистываются перемещением правой рукоятки пульта вправо вверх до упора. При активации моторов на всех страницах внизу появляется предупреждающая красная строка.
Поскольку обмен данными происходит через порт SERIALO, то при подключении провода USB дисплей следует отключать от разъема. В прошивке дисплея задана скорость порта по умолчанию 115 200. Если вы изменили скорость порта SERIAL0 в настройках контроллера, то в прошивке дисплея также следует установить новую скорость. Найдите в коде прошивки дисплея строку
Serial.begin(115200);
и в скобках укажите новое значение скорости обмена.
Дисплей можно подключить к порту SERIAL3, если к этому порту не подключен модем телеметрии. В этом случае также надо обратить внимание на совпадение скоростей портов.
В общем случае, полеты с обзором по видеокамере — довольно дорогостоящее занятие, если использовать оборудование высокого качества с большим радиусом действия. Зачастую комплект такого оборудования стоит дороже самого коптера. Но для того чтобы начать отрабатывать навыки полетов и успешно провести первый сезон, нам не потребуются существенные затраты и сложное оборудование.
Теперь разберемся, какие компоненты необходимы начинающему пилоту, а без каких вполне можно обойтись.
Одним из оптимальных и недорогих начальных вариантов может быть покупка набора, состоящего из малогабаритной CCD-видеокамеры, видеопередатчика, видеоприемника, пары всенаправленных антенн и видеоочков. Стоимость такого набора заметно меньше, чем суммарная стоимость компонентов при покупке по отдельности. Набор обычно снабжается подробными инструкциями по подключению и необходимыми соединительными проводами. Но, к сожалению, такие наборы не всегда бывают в наличии по доступной цене, поэтому нужно быть готовым к самостоятельному подбору компонентов.
Видеокамера
Вместо использования двух видеокамер — курсовой и видовой — для начинающего пилота вполне достаточно одной камеры среднего качества, закрепленной на управляемом стабилизированном подвесе. Следовательно, отпадает потребность в видеокоммутаторе и освобождается один из радиоканалов, которых и так мало в недорогой аппаратуре радиоуправления.
Наиболее простым и очевидным решением будет покупка одной из специализированных популярных экшн-камер: GoPro, Xiaomi Yui или Mobius. Для этих камер в продаже имеется широчайший выбор готовых стабилизированных подвесов различной степени сложности, разные аксессуары — чехлы, кабели, адаптеры — вплоть до специальных передатчиков, подключаемых прямо к разъему камеры.
Примечание
Обратите внимание на наличие в камере композитного видеовыхода и выхода канала звука. Такая опция обычно обозначается как "А/V Output". Некоторые современные экшн-камеры оснащены только выходом стандарта HDMI, что делает невозможным подключение такой камеры к обычному видеопередатчику. Даже если наличие композитного видеосигнала обозначено в перечне опций, вы можете столкнуться с отсутствием специального кабеля для подключения к видеовыходу. При покупке экшн-камеры не забудьте одновременно с ней приобрести соответствующий видеокабель. Через этот кабель иногда на камеру можно подавать внешнее питающее напряжение.
Стоимость даже начального комплекта "экшн-камера + подвес" составляет около 6–8 тыс. руб., что может оказаться неприемлемо для начинающего пилота, особенно с учетом возможных аварий в процессе обучения. Учебный комплект начального уровня (рис. 6.31), состоящий из миниатюрной CCD-камеры и простого подвеса на двух сервомашинках, обойдется нам не дороже 1500 руб., весьма живуч и ремонтопригоден при авариях. Миниатюрная камера, как правило, вообще не страдает даже при самых сложных падениях.
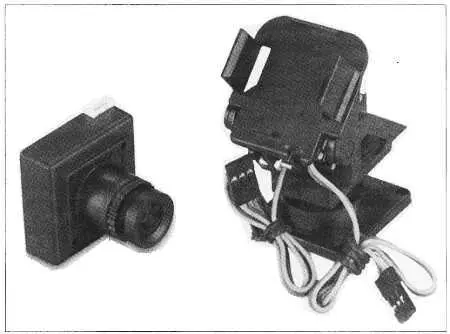
Рис. 6.31. Камера и подвес начального уровня на сервомашинках
Приобретая подвес для мини-камеры, обратите внимание, входят ли сервомашинки в комплект. Если нет, то отдельно купите сервомашинки Turnigy TG-9 или Hextronik HXT900, причем в двойном количестве, поскольку при авариях у них ломаются шестеренки редуктора.
При выборе видеокамеры предпочтителен вариант со встроенным стабилизатором питания, чтобы можно было питать камеру от источника с напряжением 7-12 В без отдельного внешнего стабилизатора. Следует избегать питания камеры и видеопередатчика от силовой батареи, т. к. в силовой цепи присутствуют импульсные помехи, засоряющие изображение. Наличие встроенного микрофона является преимуществом камеры, т. к. во время полета полезно слышать звук моторов, это элемент обратной связи между квадрокоптером и пилотом.
Читать дальшеИнтервал:
Закладка:









