В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
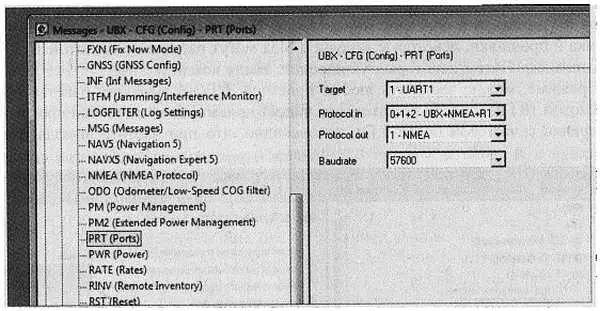
Рис. 6.21. Настройка скорости порта и протокола данных
Внимание!
Обратите особое внимание на то, что в раскрывающемся списке Protocol in должна быть выбрана именно строка 0+1+2 — UBX+NMEA+RTCM, поскольку именно по протоколу RTCM в приемник загружаются настройки. Если вы случайно отключите этот протокол, то рискуете потерять возможность менять настройки через u-Center.
Выходным протоколом в нашем случае укажем только NMEA, поскольку нет никакой необходимости выводить смешанный поток данных NMEA+UBLOX или использовать проприетарный протокол UBLOX.
Скорость обмена 57 600 бод соответствует частоте обновления навигационных данных 5 Гц. Кроме того, это рекомендованная скорость для прошивки MultiWH2.3.
Теперь в левой колонке выберите пункт RATE (Rates)и задайте новую скорость обновления навигационных данных. По умолчанию задана частота 1 Гц, т. е. свежие навигационные данные поступают в контроллер один раз в секунду. Но для управления коптером, как мы уже говорили выше, необходимо обновлять данные как минимум с частотой 5 Гц. Увеличение частоты обновления данных требует увеличения скорости обмена порта. Для частоты 5 Гц порт должен работать со скоростью не менее 57 600 бод, именно ее мы установили только что. Задайте надстройки, как показано на рис. 6.22, и нажмите кнопку Send. Сразу после этого в главном окне программы должно быть визуально заметно, что данные стали обновлять намного чаще, а значок соединения в строке статуса должен мигать с частотой
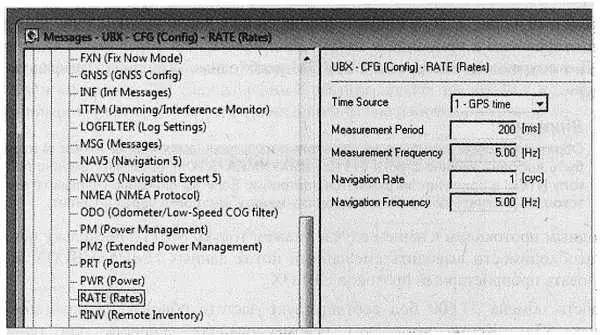
Рис. 6.22. Настройка частоты обновления навигационных данных
Чем выше частота обновления данных, тем точнее работает функция позиционирования и удержания в полетном контроллере. В зависимости от модификации приемника и прошивки, некоторые модули u-blox могут работать с частотой 10 Гц. Но есть нюансы. Путем некоторых ухищрений, введя команду $PMTK220, 100*2F в ручном режиме, можно заставить любой приемник NEO-6 выдавать пакеты данных с частотой 10 Гц. Но если при этом сам чипсет приемника не способен производить измерения с частотой более 5 Гц, то очевидно, что при частоте вывода пакетов 10 Гц каждый пакет данных будет дублироваться, и реального прироста скорости обновления мы все равно не получим.
Чтобы проверить возможности вашего варианта приемника, введите в настройки следующие параметры: Measurement Period = 100 ms; Navigation Rate = 1. Если при этом поле Navigation Rate не становится розовым, а после нажатия кнопки Sendпод ней не появляется сообщение об ошибке, значит, ваш приемник может обновлять данные с частотой 10 Гц. В этом случае не забудьте увеличить скорость порта до 115 200 бод, иначе для передачи потока данных не хватит скорости порта.
Убедившись, что с новыми настройками приемник функционирует нормально, можете сохранить их в энергонезависимую память. В левом столбце выберите строку CFG (Config), в правой части установите переключатель Save current configuration(рис. 6.23) и нажмите кнопку Send. На этом настройка завершена. Перейдите в меню Tools | GNSS Configurationи сохраните текущую конфигурацию в отдельный файл. Это поможет при необходимости быстро восстановить настройки.
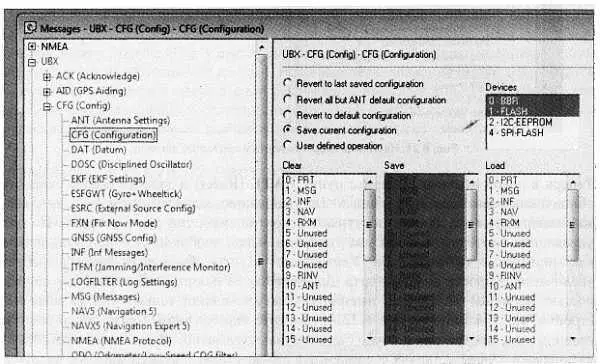
Рис. 6.23. Сохранение текущих настроек в энергонезависимую память
Подключение приемника к полетному контроллеру
Приемник подключается к порту SERIAL2, причем достаточно подключить лишь выход Тх ко входу Rx2 полетного контроллера, т. к. мы подключаем заранее настроенный приемник и настройка "на лету" средствами прошивки нам не понадобится.
В случае использования прошивки MultiWii 2.3 вносить изменения в настройки практически не потребуется. Необходимо найти следующие строки и убедиться, что они раскомментированы:
#define GPS_SERIAL 2
#define GPS_BAUD 57600
#define NMEA
#define MAG_DECLINATION x.xxf
Этих строк достаточно для того, чтобы начать использовать функцию GPS. Убедитесь, что параметр GPS_BAUD соответствует скорости последовательного порта приемника, а в параметре MAG_DECLINATION правильно указано магнитное склонение для вашей местности. Про настройку этого параметра было сказано ранее, в разделе о настройке прошивки MultiWii.
Строку //#define INIT_MTK_GPS в нашем случае следует оставить закомментированной. Она активирует процедуру автоматической настройки параметров приемников на основе чипсета МТК и в нашем случае не подходит для приемников u-blox.
Строка #define GPS_LED_INDICATOR включает мигание светодиода В при поступлении данных с приемника. Пока нет захвата спутников 3D Fix, светодиод мигает в такт поступающим пакетам данных с приемника. В режиме 3D Fix одна короткая вспышка соответствует пяти спутникам, две вспышки — шести спутникам и т. д.
Данным GPS присуща случайная погрешность, поэтому координаты пользователя не застывают в некой точке, а с каждым новым измерением "прыгают" внутри окружности, представляющей собой границы зоны погрешности. Соответственно, если квадрокоптер будет идеально отслеживать координаты каждого измерения, то в режиме удержания позиции он начнет хаотично метаться внутри окружности с радиусом 2–4 м. Поэтому данные GPS подвергают усреднению и фильтрации.
Строка #define GPS_LEEAD_FILTER активизирует режим предиктивной фильтрации, чтобы скомпенсировать задержку данных GPS, когда коптер быстро сменил позицию, а новые координаты еще не поступили. Алгоритм фильтра пытается ввести предсказание, координат на основании известного ранее вектора движения и данных об ускорениях с акселерометра.
Строку //#define GPS_FILTERTING лучше оставить закомментированной. Это фильтр с сильным усреднением для компенсации шумов данных, когда данные распределены внутри зоны погрешности чересчур хаотично. Фильтр вносит большую задержку в работу функции позиционирования. Может быть полезен при использовании старых модификаций приемников.
Строка #define GPS_WP_RADIUS 200 определяет расстояние до заданной точки в сантиметрах, при котором можно считать, что точка уже достигнута. Указывать расстояние менее 200 см нет смысла, т. к. это минимальная погрешность применяемых нами гражданских приемников. В противном случае контроллер коптера может считать, что нужные координаты не достигнуты и бесконечно долго флуктуировать около точки назначения.
Параметр #define NEW_SLAVE_RATE 30 определяет сглаживание случайных выбросов данных. Если коптер ведет себя стабильно в режимах GPS HOLD и GPS HOME, можно попробовать уменьшить этот параметр до 15.
Читать дальшеИнтервал:
Закладка:









