В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Стартовая позиция GPS HOME обнуляется каждый раз при арминге моторов. То есть, квадрокоптер считает "домашней" ту точку, в которой активированы моторы. Но это не всегда приемлемо для опытных пилотов. Например, при полетах по FPV оператор может посадить коптер на крышу здания, отключить моторы, затем взлететь снова. В этом случае первоначальные домашние координаты будут утрачены и в случае срабатывания функции Filesafe при утрате связи коптер автоматически вернется на крышу здания, а не к оператору. Чтобы этого не случалось, можно раскомментировать строку //#define DONT_RESET_HOME_AT_ARM. При этом в качестве домашних запоминаются координаты, в которых выполнена команда калибровки гироскопов (левый стик до упора влево и вниз, правый стик до упора вверх).
Подключение приемника GPS с прошивкой MahoWii
Настройка прошивки MahoWii для подключения приемника NEO-6M лишь незначительно отличается от настроек прошивки MultiWii v2.3. Необходимо задать высоту полета, которую будет поддерживать коптер при автоматическом возвращении домой по функции RTH в строке #define ALT_TO_RTH 3000. Высота задается в сантиметрах.
В строке #define ALT_TO_RTH_FINISH 200 указывается высота зависания при достижении точки возврата. Не следует указывать высоту меньше 200 см, т. к. за время полета может накопиться погрешность барометра. Кроме того, как вы помните, барометр дает большую погрешность при висении на малой высоте.
Строка #define INS_PH_NAV_ON включает инерциальную систему удержания позиции, которая учитывает данные акселерометра для повышения точности удержания.
Теперь, когда можно приобрести по доступной цене графические OLED- или TFT-модули, приобретение двустрочного текстового дисплея для подключения к полетному контроллеру вряд ли целесообразно. Поддержка OLED-дисплеев встроена в прошивку MultiWii. Для подключения цветного TFT-дисплея автор разработал собственную конструкцию на базе микроконтроллера ATmega328.
Монохромный OLED дисплей CRIUS СО-16
Дисплей подключается по протоколу I 2С к соответствующему четырехконтактному разъему полетного контроллера. На этот же разъем выведено напряжение питания +5 В. Обратите внимание, что в отличие от "перекрестного" подключения по последовательному протоколу UART, соединение для I 2С должно быть прямым: SDA —> SDA, SCL —> SCL.
Для активации поддержки OLED-дисплея в прошивке найдите секцию LCD/OLED — display settings и раскомментируйте строку
#define OLED_I2C_128x64
Если вы не хотите, чтобы при включении питания на дисплей выводилась стартовая заставка в виде логотипа MultiWii, то закроите комментарием строку
#define SUPPRESS_OLED_I2C_128x64LOGO
Теперь включим вывод телеметрии на дисплей строкой
#define LCD_TELEMETRY
Информация разбита на девять страниц, с 1 по 9. Нулевой странице соответствует пустой экран. Можно задать автопереключение страниц строкой
#define LCD_TELEMETRY_AUTO "123452679"
или установить произвольный порядок автопереключения, например
#define LCD_TELEMETRY_AUTO "212232425262729"
где странице номер два уделено особое внимание. Должна быть раскомментирована только одна из двух упомянутых строк.
Страницы можно переключать вручную, движением правого стика до упора вправо вверх. Для этого строки автопереключения должны быть закомментированы, а раскомментировать надо строку
#define LCD_TELEMETRY_STEP "0123456789"
Порядок следования страниц может быть произвольным, любые страницы, включая нулевую, можно удалить из последовательности или повторить.
Настройка параметров через меню дисплея
При помощи стиков пульта и меню, отображаемого на дисплее, можно настроить различные параметры: PID, экспоненты, минимальный и максимальный газ, привязку переключателей AUX. Прямо скажем, делать это, глядя на крошечный монохромный экран — удовольствие на большого любителя. Но в ситуации, когда подходящий смартфон или ноутбук недоступен, может пригодиться и дисплей. Для включения функции конфигурирования раскомментируйте строку
#define LCD_CONF
Чтобы разрешить изменение привязки переключателей AUX, раскомментируйте еще одну строку:
#define LCD_CONF_AUX
Для входа в меню конфигурации надо левый стик переместить вправо вниз, а правый стик — вверх. Эти движения следует делать одновременно, иначе вместо входа в меню вы можете левым стиком активировать моторы. Полный перечень движений стиков для настройки через дисплей приведен в приложении 3 .
Проблемы с подключением дисплеев CRIUS OLED и их решение
Дисплеям CRIUS CO-16 версии 1.0 присущи конструктивные недостатки, которые устранены в более новых версиях. Но дисплеев первой версии и их клонов было изготовлено очень много, поэтому вероятность купить неустойчиво работающий модуль довольно велика. Прежде всего, упомянутым дисплеям присуща проблема неустойчивого сброса, так называемое "звездное небо". При включении питания встроенный контроллер дисплея не сбрасывается, очищая видеопамять, и экран хаотично покрывается одиночными светящимися пикселами. Далее дисплей уже не реагирует на команды и данные с полетного контроллера. Некоторые экземпляры дисплеев зависают изредка, некоторые при каждом включении.
Простым и широко известным способом решения этой проблемы является включение резистора с номиналом 150–200 Ом в разрыв плюсового провода питания. Резистор маломощный, затягивается вместе с проводом и местом пайки в термоусадочную трубку. Может потребоваться подобрать номинал резистора для более устойчивой работы. У автора дисплей работает с сопротивлением 180 Ом. Этот способ хорош тем, что требует минимальные навыки пайки.
Если включение резистора не помогает, попробуйте подключить RC-цепь к выводу сброса контроллера дисплея, как показано на рис. 6.24 и 6.25. Этот способ требует наличия соответствующих инструментов и навыка пайки миниатюрных компонентов.
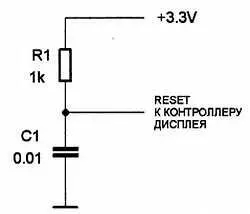
Рис. 6.24. Схема подключения RC-цепи сброса
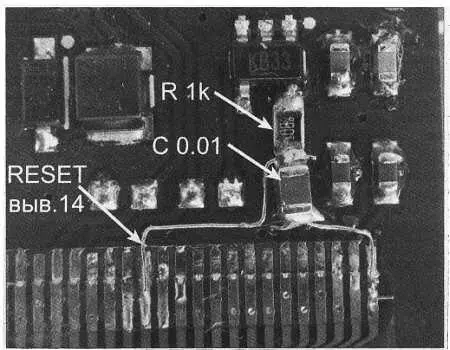
Рис. 6.25. Монтаж компонентов цепи сброса
В сочетании определенных экземпляров полетного контроллера и дисплея может возникнуть ситуация, когда при подключении дисплея резко возрастает количество ошибок на шине I 2С, полетный контроллер неустойчиво читает данные с датчиков либо вообще зависает. Предположительно, это вызвано чрезмерной "подтяжкой" линий SCL и SDA к напряжению питания встроенным контроллером дисплея, что приводит к неустойчивой работе отдельных экземпляров сенсоров на плате полетного контроллера. Проблема может быть устранена последовательным включением резисторов с сопротивлением 560–750 Ом в разрыв проводов SCL и SDA, соединяющих дисплей и полетный контроллер. Точное значение номинала резисторов надо подобрать опытным путем.
Читать дальшеИнтервал:
Закладка:









