В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Запустите системную утилиту Regedit, откройте ветку реестра
HKEY_LOCAL__MACHINE\SYSTEM\CurrentControlSet\services\sermouse
и измените значение параметра start с з на 4. Затем перезагрузите компьютер. После перезагрузки в системе после подключения адаптера и приемника должен быть виден только виртуальный СОМ-порт.
По умолчанию в приемниках NEO-6M установлена скорость обмена данными 9600 бод и протокол выходного потока данных NMEA. Но в приемниках, купленных с рук или настроенных продавцом под конкретное устройство, эти параметры могут быть другими.
Подключите приемник к компьютеру и запустите программу u-Center (рис. 6.19).
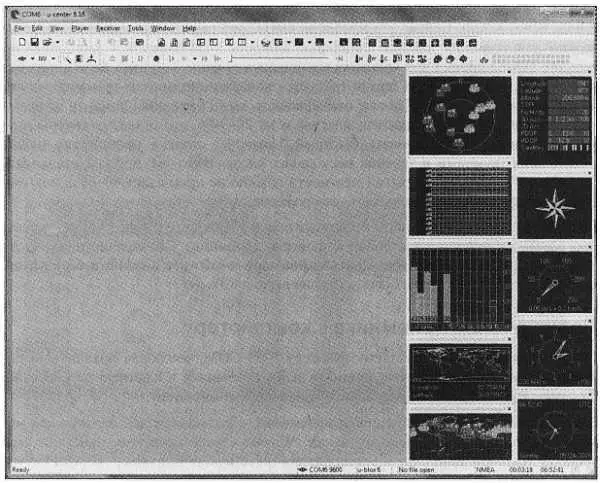
Рис. 6.19. Главное окно программы u-Center
В меню Receiver | Portвыберите нужный последовательный порт. Далее в меню Receiverпоставьте галочку напротив строки Autobauding. Если скорость обмена заранее неизвестна или изменилась в процессе настройки, программа сама подберет правильную скорость. Далее выберите версию вашего приемника: Receiver | Generation | u-blox 6.
Как правило, после этого соединение с приемником устанавливается автоматически, о чем говорит мигающий зеленым цветом значок в строке состояния внизу окна, а в окнах программы появляется отображение текущих данных.
Первый старт приемника может происходить очень долго, даже при хорошей видимости спутников. В некоторых случаях захват спутников 3D Fix может не произойти вообще. Не волнуйтесь, это нормально. Далее мы разберемся, как загрузить в приемник данные для холодного старта с внешнего сервера.
Примечание
Первое, что нужно сделать после установления связи с новым приемником, — сохранить в файл его текущую конфигурацию на случай, если вы что-то случайно испортите в процессе настройки или экспериментов.
Выберите меню Tools | GNSS Configurationи нажмите кнопку GNSS > File. Текущие настройки будут прочитаны из приемника и сохранены в виде текстового файла. В дальнейшем этот файл можно редактировать, нажав кнопку Edit, если вы хорошо изучили спецификацию приемников u-blox и хорошо понимаете, что делаете. Готовые файлы настроек для специальных случаев можно часто встретить на форумах. Эти настройки нужны при работе с пользовательскими версиями прошивок или дополнительными устройствами наподобие адаптера для подключения приемника по шине I 2С.
Сохраненную конфигурацию можно выгрузить в приемник из файла нажатием кнопки File > GNSS. Если при этом установлена галочка сохранения в энергонезависимую память (non-volatile memory), то настройки будут записаны в EEPROM и сохранятся после отключения питания. В противном случае настройки будут действовать только до первого отключения питания.
Следующий шаг после подключения приемника— регистрация на фирменном онлайн-сервисе u-blox AssistNow для получения логина и пароля.
Получение доступа к сервису AssistNow Online
При первом включении после долгого перерыва, когда резервный источник разряжен или данные альманаха или эфемериса, сохраненные в памяти, утратили свою валидность, старт приемника может затянуться на минуты или часы, а при неудачном стечении внешних факторов не состояться вообще.
AssistNow — это фирменный онлайн-сервис компании u-blox. Сообщив этому сервису свои текущие или предполагаемые координаты, вы тут же получаете в ответ набор данных (альманах, эфемериды, точное время) для данной точки земной поверхности в момент запроса. Этот альманах через последовательный порт загружается в приемник, после чего приемник в течение нескольких секунд переходит в режим 3D Fix.
Сервис полностью бесплатный и доступен всем при наличии интернет-соединения.
Логин и пароль предоставляются в автоматическом режиме. Отправьте письмо с темой "login/password request" на адрес agps-server@u-blox.com. Через несколько минут вы получите автоматическое ответное письмо, в котором будет ваш логин и пароль. Обычно в качестве логина используется адрес электронной почты, с которого отправлено письмо. В письме сказано, что доступ к сервису предоставляется в течение нескольких часов после отправки письма, но на самом деле обычно доступен сразу, как только вы получили ответ.
Выберите в меню u-Center пункт Tools | AssistNow Online | AssistNow Oline (u-blox 5–7). В поля Latitude(широта) и Longitude(долгота) введите ваши предполагаемые координаты. Их можно определить при помощи смартфона или посмотреть на карте maps.google.com . Высоту Altitudeи погрешность Accuracyможно задать нулевыми. Далее введите свои логин и пароль, адрес сервера и номер серверного порта не меняйте. Запрос пакета данных Request — full(полный набор всех доступных данных).
Далее необходимо выбрать команду сброса, которая будет передана приемнику после загрузки данных (рис. 6.20).
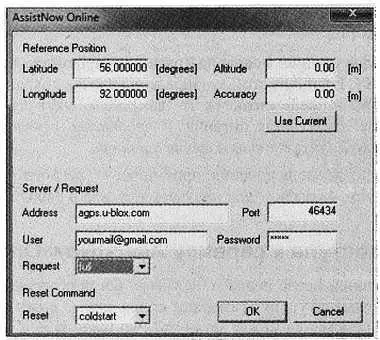
Рис. 6.20. Настройки сервиса AssistNow Online
Рекомендуем всегда выбирать полный "холодный" рестарт (cold), т. к. при быстром "горячем" рестарте приемник иногда почему-то остается в состоянии 2D Fix. Холодный рестарт длится на 20–30 с дольше, но гарантированно перезапускает приемник в полностью рабочее состояние.
Теперь нажмите кнопку ОК, и начнется загрузка данных с сервера в ваш приемник. Это займет 3–4 с. После того как приемник перезагрузится, определит текущие координаты и войдет в режим 3D Fix, вы можете вновь открыть окно AssistNow Online, нажать кнопку Use Currentдля использования текущих координат и повторно загрузить уточненные данные. Все введенные значения полей сохраняются в памяти компьютера и могут быть использованы при следующем запросе. Но, как правило, при нормальной эксплуатации приемника с небольшими, не более недели, перерывами, необходимость повторных обращений к сервису не возникает.
Изменение текущих настроек
Для подключения приемника к полетному контроллеру необходимо изменить лишь три основные настройки: скорость последовательного порта, частоту обновления навигационных данных и протокол потока данных. В программе u-Center при подключенном приемнике нажмите клавишу . Откроется окно настроек и сообщений. Убедитесь, что в левом нижнем углу нажата кнопка Disable/Enabe Autopolling(названия кнопок появляются при наведении указателя мыши). Это функция автоматического опроса настроек приемника. Настройки считываются примерно раз в три секунды.
В левом столбце выберите раздел UBXи подраздел CFG (Config). Ниже в списке выберите пункт PRT (Ports). Теперь в списке справа выберите опции именно так, как показано на рис. 6.21, и нажмите кнопку Sendв левом нижнем углу. Настройки будут отправлены в приемник и начнут действовать до первого отключения питания . Для сохранения настроек в EEPROM необходимо выполнить отдельную процедуру.
Читать дальшеИнтервал:
Закладка:









