В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В сигнальном методе используется непрерывное измерение уровня принимаемого сигнала. В простых самодельных трекерах применяют 2–3 независимых приемника с антеннами, направленными под слегка различающимися углами. Контроллер трекера сравнивает уровни сигналов с приемников и поворачивает турель в сторону антенны с наилучшим сигналом (рис. 2.19).
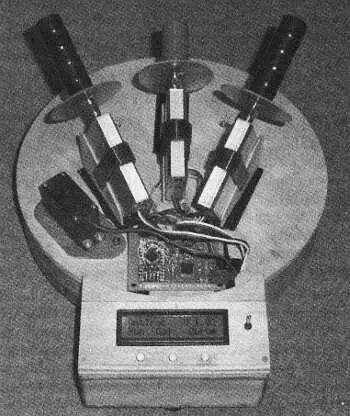
Рис. 2.19. Самодельный трекер сигнального типа стремя приемниками
( http://fpvlab.com/forums/showthread.php78331 )
Достоинством системы является правильная ориентация в направлении наилучшего приема. Очевидный недостаток — использование нескольких приемников и антенн.
В более простом, сканирующем, варианте используется один приемник и антенна. Контроллер непрерывно измеряет уровень сигнала с выхода RSSI приемника и при его снижении отклоняет антенну на несколько градусов в различных направлениях, сканируя зону слежения и "отлавливая" новое оптимальное направление. Поскольку слежение происходит непрерывно, после нескольких циклов корректировки/отслеживания контроллер начинает более-менее точно предсказывать направление движения объекта.
В дорогих профессиональных системах может применяться антенна с синтезированной апертурой и измерение сдвига фаз несущей частоты для уточнения направления на объект.
Очевидным недостатком трекеров, использующих слежение по уровню сигнала, является возможность ложного захвата постороннего источника более мощного сигнала, случайно работающего на этой же частоте. Но, к счастью, в открытом поле вероятность такого события невысока.
Самой простой и недорогой альтернативой автоматическому трекеру является ручное управление антенной. Некоторые комплекты аппаратуры радиоуправления позволяют привязать к передатчику несколько приемников. В этом случае недорогой приемник ставят на трекер, подключают к нему сервомашинку трекера и управляют поворотом антенны, вращая потенциометр на пульте.
Диверсификация антенн
Летающие модели интенсивно меняют свое положение в пространстве. Поэтому важно обеспечить устойчивый радиоканал при любом взаимном положении антенн. В приемниках радиоуправления иногда используют две антенны, расположенные под углом 90°, или дополнительные приемники-сателлиты, у которых тоже располагают антенны в разных местах модели и под разными углами. Этот прием называется пространственной диверсификацией антенн .
Иногда возникает потребность в диверсификации по типу антенны (рис. 2.20).
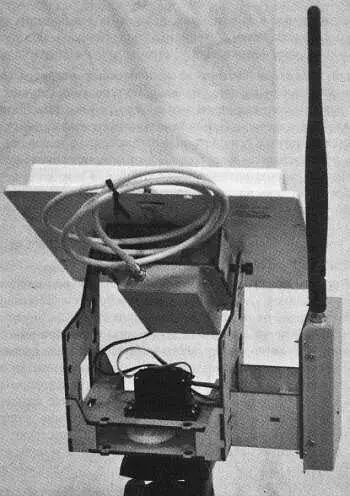
Рис. 2.20. Антенная система со следящей основной антенной и диверсификацией за счет штыревой всенаправленной антенны
( http://www.readymaderc.com )
Например, антенны для приема видеосигнала могут обладать очень острой диаграммой направленности. Такое свойство существенно повышает эффективную дальность приема и помехоустойчивость, но стоит отклонить антенну на несколько градусов в сторону от направления на модель, и сигнал может резко и внезапно пропасть. Поэтому в сочетании с остронаправленной антенной иногда применяют вторую антенну, имеющую более широкую или вообще круговую диаграмму направленности. При потере сигнала с основной антенны качество сигнала с дублирующей может быть заметно хуже, но в большинстве случаев оператору его будет достаточно, чтобы не потерять управление.
Диверсификация по частотному диапазону (дублирование канала) в любительской практике применяется редко, т. к. требует наличия двойного комплекта приемопередающего оборудования на разные диапазоны.
Двигатели, применяемые в авиамоделях, делятся на два больших семейства: коллекторные и бесколлекторные. Устройство коллекторного двигателя вы должны знать из школьного курса физики. Для тех, кто забыл, очень кратко напомним.
Коллекторный двигательсостоит из неподвижных Магнитов, прикрепленных к корпусу ( статор ) с чередованием полюсов и нескольких катушек, смонтированных на валу ( ротор ). Напряжение на катушки ротора поступает через скользящие контакты ( коллектор и щетки ). При подаче напряжения на катушку ротора, вокруг нее формируется магнитное поле. Катушка отталкивается от полюса одного из магнитов статора и притягивается к другому. В этот момент происходит переключение полярности питания за счет вращательного смещения контактов коллектора относительно щеток и катушка начинает притягиваться к следующему магниту. Коллекторный двигатель— это классический пример самоуправляемой системы, он сам себе переключает полярность катушек в нужный момент во время вращения. Направление вращения зависит от полярности питающего напряжения, а частота вращения от величины напряжения.
В бесколлекторных двигателяхкоммутация катушек происходит при помощи специальной электронной схемы — регулятора оборотов (Electronic Speed Controller, ESC). Независимо от количества катушек и схемы их внутренней коммутации бесколлекторный двигатель авиамодели всегда имеет три вывода, подключаемые к регулятору. Регулятор подает на эти выводы питающее напряжение со сдвигом по фазе. Поскольку выводы катушек подключены к регулятору неразрывно, то катушки смонтированы неподвижно и являются статором, а вращается ротор с прикрепленными к нему постоянными магнитами. Направление вращения зависит от подключения выводов двигателя к регулятору. Для изменения направления вращения достаточно поменять местами два любых вывода. Существуют более сложные конструкции двигателей, оснащенные датчиком оборотов и подключаемые к специальным регуляторам. В этом случае для изменения направления вращения необходимо перепрограммировать регулятор.
Если магниты расположены снаружи относительно катушек, такие двигатели называют аутраннерами ( outrunner ); если катушки расположены снаружи, а внутри вращается намагниченный ротор — инраннерами ( inrunner ). В квадрокоптерах и большинстве авиамоделей применяют аутраннеры. Удельная мощность и КПД бесколлекторного двигателя существенно зависит от мощности постоянных магнитов ротора, поэтому обычно используются неодимовые магниты. Они приклеены на внутреннюю сторону ротора. Если двигатель уронить на твердую поверхность, от удара магниты могут отклеиться или треснуть.
Внимание!
Трещина может быть незаметна глазу, но приведет к снижению мощности двигателя и может вызвать пропуски фазы и даже заклинивание двигателя отвалившимся осколком магнита прямо во время полета.
Читать дальшеИнтервал:
Закладка:









