В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
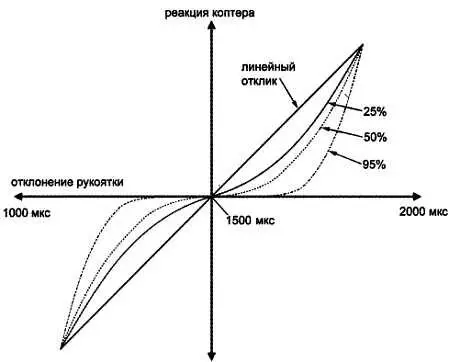
Рис. 2.10. Экспонента сигнала управления
Наличие экспоненты позволяет мягко и комфортно управлять моделью в районе небольших отклонений рукояток, но в то же время при необходимости резко воздействовать на модель, парируя порыв ветра или выполняя вираж. Глубину экспоненты каждый пилот настраивает под себя и для каждой модели в отдельности.
В общем случае рекомендуется увеличивать экспоненту для начинающих пилотов, склонных к нервным и суетным подергиваниям рукояток пульта, и уменьшать вплоть до полной линейности отклика для воздушной акробатики.
Примечание
Применительно к мультикоптерам, глубина экспоненты задается в настройках контроллера, а в настройках пульта экспоненты быть не должно. Экспоненты пульта и контроллера не должны накладываться на сигнал одновременно.
Как вы уже поняли, общая концепция радиоуправления коптером такова: пульт должен передать максимально точные и стандартные "сырые" сигналы управления, а всю дальнейшую обработку будет выполнять полетный контроллер на основе своих настроек.
Конвертер PPM-SUM
У многоканальной системы с раздачей широтно-модулированных импульсов по раздельным выходным каналам есть принципиально неустранимые недостатки. Во-первых, отдельный сигнальный провод для каждого канала. Это особенно актуально для 12- или 14-канальных систем. В этом случае миниатюрный приемник соединяется с полетным контроллером и прочими бортовыми устройствами толстым жгутом проводов, неэстетичным и весящим больше, чем сам приемник. Однако полетный контроллер может и сам декодировать "сырой" РРМ-сигнал, при условии, что он выведен на отдельный выход приемника.
Во-вторых, низкая стабильность и точность управляющего сигнала, обусловленная необходимостью лишних преобразований из одного типа сигнала в другой. Было бы логично передать цифровое значение, соответствующее положению рукоятки пульта, по радиоканалу и затем из приемника переслать в исполнительное устройство без лишних преобразований. Однако для обработки цифрового сигнала исполнительное устройство должно обладать собственными вычислительными ресурсами. Но возможность выпускать такие устройства массово и недорого возникла лишь относительно недавно, с появлением дешевых и миниатюрных микроконтроллеров. Поэтому в традиционной системе приемник в любом случае преобразует цифровой сигнал в импульсы определенной длительности на выходе канала. Несмотря на то, что импульс представлен двоичными уровнями сигнала "0" и "1", физическая длительность импульса — это аналоговый параметр. То есть, на этапе передачи-приема мы имеем преобразование из аналогового сигнала в цифровой и обратно в аналоговый.
Если выход приемника подключен к обычной сервомашинке (принцип ее работы мы рассмотрим далее), то она использует непосредственно длительность импульса в качестве управляющего параметра. Если же мы подаем широтно-модулированный импульсный сигнал на вход полетного контроллера, то он должен измерить длительность импульса при помощи таймера и перевести ее в цифровое значение.
В итоге мы получаем в тракте управления цепочку преобразований, каждое из которых вносит свою погрешность и задержку. Итак, очевидные недостатки традиционной системы радиоуправления — ограниченная пропускная способность, искажения и задержки сигналов управления, толстый пучок проводов от приемника к исполнительным устройствам. Чтобы избавиться от пучка проводов, используют специальное устройство — кодер-конвертер РРМ. С точки зрения инженерной логики это довольно забавное устройство. Оно подключается к выходам каналов приемника и преобразует раздельные командные импульсы обратно в последовательность пакетов импульсов. С выхода конвертера сигнал РРМ поступает на специальный вход полетного контроллера. Такой вход обычно обозначают PPM-SUM, т. к. на него подается суммарный сигнал РРМ. Приемник только что успешно "разложил" сигнал по каналам, а конвертер снова собирает их в последовательность, внося дополнительную погрешность и задержку. Пожалуй, основная польза от такого устройства — избавление от пучка проводов.
Вполне логично, что появились приемники, оснащенные выходом последовательного сигнала. Это может быть как все тот же универсальный сигнал PPM-SUM, так и особый проприетарный последовательный сигнал S-BUS фирмы Futaba, похожий на протокол UART. Разные производители могут кодировать выходной сигнал по-разному. Последовательный протокол позволяет подключать все управляемые исполнительные устройства к одной общей шине. Каждое устройство, получив синхроимпульс, считывает с шины "свой" пакет цифровых данных и декодирует его.
Поскольку пакеты данных в последовательном канале следуют в определенном порядке, цифровое исполнительное устройство (сервомашинка, регулятор оборотов, радиоключ) должно быть предварительно запрограммировано на определенный номер канала, т. е. на извлечение "своего" блока данных из последовательного потока. Для этого применяются специальные программаторы. Если последовательный сигнал подается на специальный вход полетного контроллера, то дальнейшую обработку выполняет контроллер, а порядок следования каналов настраивается в прошивке контроллера или в приемнике. В любом случае порядок следования каналов в передатчике и контроллере должен совпадать.
Приемник-сателлит
Надежность работы радиоканала можно повысить при помощи специального приемника-сателлита. Он представляет собой обычный приемник, у которого отсутствует узел обработки принятого сигнала. Вместо этого на выход сателлита идет последовательный "сырой" поток. Этот поток поступает на специальный вход основного приемника. Некоторые приемники допускают подключение двух сателлитов.
Приемники монтируют так, чтобы антенны базового приемника и сателлита находились на максимальном расстоянии друг от друга. Антенны могут иметь разную конструкцию и ориентацию в пространстве. Если одна из приемных частей теряет сигнал, ее подстраховывает вторая часть.
Поскольку полетный контроллер может самостоятельно обрабатывать последовательный управляющий сигнал, можно подключить маленький и легкий сателлит непосредственно к контроллеру и обойтись без основного приемника, уменьшив вес и энергопотребление. Такое решение популярно при разработке миниатюрных конструкций, которые обычно не улетают из зоны устойчивой связи.
Встроенная телеметрия
Поскольку почти все современные пульты управления, даже недорогие, оснащены матричным графическим дисплеем, вполне логично использовать этот дисплей для отображения данных телеметрии. Для этого можно заменить прошивку пульта версией, поддерживающей вывод телеметрии, и внести изменения в конструкцию пульта, подключив к нему внешний приемник. Но проще приобрести готовый комплект модулей, например FrSky. Модуль, подключаемый к пульту, содержит не только передатчик радиоуправления, но и приемник сигналов телеметрии. Существуют также дорогие и сложные комплекты аппаратуры радиоуправления со встроенной функцией телеметрии и даже с отдельным специальным дисплеем на пульте.
Читать дальшеИнтервал:
Закладка:









