В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
• При наличии GPS-навигации.Сигнал газа выставляется в положение, соответствующее висению. Сигналы управления положением выставляются в среднее положение (горизонталь), включается режим автостабилизации горизонта. Включается функция "возврат домой". Включается барометр, в прошивке контроллера должно быть задано значение высоты, на которой происходит возврат к точке старта, и высоты, на которой квадрокоптер зависает после возвращения. Например, если полет может происходить над лесом, то квадрокоптер должен возвращаться, гарантированно пролетая выше самых высоких деревьев. В итоге при срабатывании Failsafe квадрокоптер должен сам вернуться к месту старта и зависнуть на заданной высоте.
Даже если вы не планируете автоматические полеты по заданному маршруту, наличие приемника GPS очень полезно с точки зрения сохранности квадрокоптера. А если вы собираетесь использовать дорогую видеокамеру в комплекте с бесколлекторным гироподвесом и качественным видеопередатчиком, то приемник GPS является обязательным устройством, поскольку именно он вернет вам оборудование общей стоимостью более тысячи долларов в случае потери управления.
Функция Failsafe может быть реализована как приемником, так и полетным контроллером. Что лучше? Лучше не лениться и настроить оба варианта. Вероятность внезапного и полного отказа приемника во время полета невелика, но не равна нулю. В случае полного отказа приемника функцию Failsafe реализует полетный контроллер. Некоторые приемники не имеют встроенной защиты от потери связи, в этом случае вся надежда только на контроллер.
Модуляция сигнала РРМ
Обычный многоканальный приемник получает по радиоканалу кодированный последовательный сигнал управления, декодирует его и "раскладывает" по отдельным выходам приемника для каждого канала. Параметры сигнала на выходе индивидуального канала определяются единым общепризнанным стандартом и не зависят от типа кодирования в передатчике или марки производителя. Статьи на тему популярных стандартов кодирования в аппаратуре радиоуправления писали или переводили все, кому не лень. В том числе и люди, далекие от радиотехники, что породило изрядную смысловую и терминологическую путаницу. Давайте разберемся по порядку.
Стандарт кодирования PPM ( Pulse Position Modulation — фазово-импульсная модуляция) очень старый и популярный, поскольку может формироваться и обрабатываться без использования микроконтроллеров, при помощи обычных интегральных счетчиков и таймеров. Сейчас нечасто можно встретить передатчик с классической модуляцией сигнала РРМ, разве что в китайских игрушках с инфракрасным пультом, но мы разберем этот стандарт подробно. Ведь каким бы способом сейчас не передавали информацию по радиоканалу, на выходе декодера обычного приемника мы имеем импульсы радиоуправления со строго определенными параметрами, которые исторически происходят от РРМ и не меняются для обеспечения совместимости между оконечным (управляемым) оборудованием и массовой радиоаппаратурой разных производителей.
Итак, обратимся к рис. 2.9, на котором схематично изображен стандартный сигнал РРМ для четырех каналов.
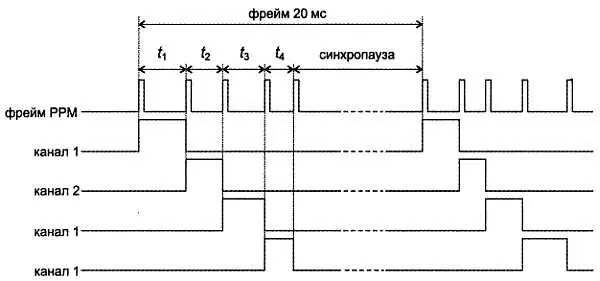
Рис. 2.9. Сигнал РРМи его раскладка по каналам управления
Сигнал РРМ состоит из фреймов (frame) длительностью 20 мс. В свою очередь, фрейм состоит из стробирующих импульсов, которые разделяют каналы, и синхропаузы, благодаря наличию которой приемник начинает ожидать следующий кадр.
Как видно из диаграммы, расстояние t x между фронтами соседних синхроимпульсов соответствует длительности импульса в канале приемника. То есть, можно сказать, что в сигнале РРМ информация канала содержится в положении (position) стробирующего импульса относительно начала фрейма или предыдущего строба. Длительность стробирующих импульсов лежит в диапазоне 100–400 мкс. При помощи синхропаузы приемник опознает начало следующего фрейма, затем, опираясь на стробирующие импульсы, распределяет импульсы управления по ка-налам. Для надежного разделения фреймов длительность синхропаузы должна быть не менее 2500 мкс. В противном случае приемник может не опознать начало следующего фрейма и отправить на выходы каналов непредсказуемые импульсы.
В свою очередь, импульсы на выходе отдельного канала следуют с периодом в 20 мс (т. е. с частотой 50 Гц), и меняется их ширина. Такое кодирование информации называют PWM (Pulse Width Modulation) или ШИМ (широтно-импульсная модуляция). Иными словами, в приемнике сигнал РРМ превращается в разделенные по каналам сигналы PWM. Именно эти импульсы PWM мы до сих пор получаем на канальных выходах приемников, даже самых современных. Исключение составляют приемники с последовательным выходным каналом, но об этом позже.
Поскольку именно длительность импульса в канале несет в себе информацию, параметры этого импульса стандартизованы: минимальная — 1000 мкс, средняя — 1500 мкс, максимальная — 2000 мкс. Обязательно запомните диапазон этих значений, они фигурируют в настройках квадрокоптера и пригодятся вам в дальнейшем.
Производители аппаратуры позволяют задать в настройках более широкий диапазон значений, порядка 800-2200 мкс, но в квадрокоптерах такие значения обычно не применяются.
В стандартный сигнал РРМ с фреймом длительностью 20 мс можно упаковать не более восьми каналов (обычно шесть-семь). Проблема в ограничении минимальной длительности синхропаузы. Давайте посчитаем вместе. Представьте ситуацию, когда по восьми каналам надо передать импульсы максимальной длительности t 1 … t 8 = 2000 мкс. Тогда суммарная длительность канальных импульсов составит 8·2000 = 16 000 мкс, а для синхропаузы останется 20 000-16 000 = 4000 мкс. Этого более чем достаточно для надежной работы приемника. Но если добавить девятый канал, то на долю синхропаузы останется 20 000 — 9·2000 = 2000 мкс. С такой синхропаузой декодер стандартного приемника не сможет опознавать начало фрейма и разделять каналы. Если же передатчик формирует канальные импульсы с максимальной длительностью 2200 мкс, то в стандартный фрейм не поместятся даже восемь каналов. Поэтому производители аппаратуры идут на ухищрения и увеличивают длину фрейма. Таким способом удается уместить в сигнал РРМ до 14 каналов. Благо, в большинстве современных пультов можно настраивать длину фрейма, длину строба и количество каналов. Чтобы приемник распознавал такой, не вполне стандартный, сигнал, его приходится прошивать соответствующей прошивкой. Недостатком этого подхода является проблема совместимости приемников и передатчиков.
Читать дальшеИнтервал:
Закладка:









