В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Использование сонара оправдано для автоматического включения посадочных огней при заходе на посадку. Обычно нужно, чтобы подсветка посадочной площадки включалась на высоте около 2–3 м. Барометр на этой высоте будет иметь большую погрешность, особенно если во время полета изменилось атмосферное давление, а точности сонара вполне достаточно для включения огней.
В качестве примера использования полного набора сенсоров рассмотрим плату популярного полетного контроллера CRIUS All-In-One Pro (AIOP) версия 2 (рис. 2.8).
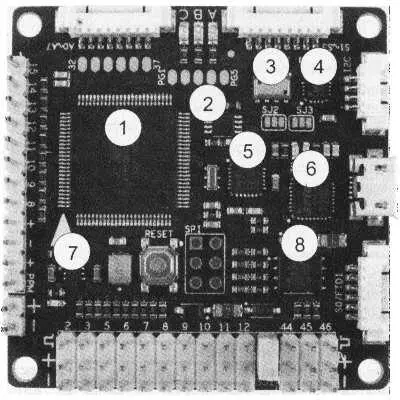
Рис. 2.8. Популярный полетный контроллер MultiWii AIOP v.2:
1— микроконтроллер ATMEGA2560; 2— конвертер логических уровней шины I 2C PCA9306DP1; 3— барометр MS5611; 4— магнитометр HMC5883L; 5— гироскоп + акселерометр MPU6050; 6— адаптер USB/UART FT232RQ; 7— стабилизатор +3,3 В; 8— флеш-память 16Mbit AT45DB161D
Микроконтроллер(1) выполняет обработку управляющих сигналов от радиоаппаратуры и показаний сенсоров и формирует управляющие сигналы для регуляторов оборотов моторов. Наиболее часто применяются микроконтроллеры Atmel, достаточно быстродействующие, недорогие и с низким энергопотреблением. Однако в последнее время, с совершенствованием и усложнением вычислительных алгоритмов, разработчики все чаще упираются в ограничения быстродействия процессора и объема программной памяти. Существуют более мощные решения, например на ARM-контроллерах от ST Microelectronics, и даже экзотические конструкции на базе микрокомпьютера Raspberry Pi.
Встроенный стабилизатор напряжения 3,3 В(7) необходим для питания микроконтроллера и сенсоров. Как правило, источник бортового питания имеет напряжение 5 В, потому что именно это напряжение требуется для питания радиоприемника и различных дополнительных модулей.
Конвертер уровней шины I 2C(2) используется для согласования логических уровней микроконтроллера и внешних устройств, подключенных к шине. Микроконтроллер питается напряжением 3,3 В и поддерживает соответствующие низковольтные логические уровни на шине. Но некоторые внешние устройства, такие как модули GPS, выносные компасы, дисплеи, могут питаться напряжением 5 В. Разница логических уровней между трех- и пятивольтовыми схемами может вывести из строя микроконтроллер.
Встроенный конвертер USB-UART(6) не нужен в процессе полета, но он позволяет подключить полетный контроллер непосредственно к разъему USB стационарного компьютера или ноутбука для записи прошивки или настройки. Микроконтроллер обменивается данными с компьютером через протокол последовательной передачи данных UART, а компьютерный СОМ-порт — это одна из реализаций протокола UART, называемая RS-232. Но даже если в вашем компьютере еще остался аппаратный СОМ-порт, то напрямую подключать к нему выводы микроконтроллера нельзя! Электрические параметры порта RS-232 существенно отличаются от уровней стандартной трех- или пятивольтовой TTL-логики. В протоколе RS-232 логический ноль лежит в диапазоне от +3 до +12 В, а единица— от -3 до -12 В. Промежуток от -3 до +3 В считается зоной неопределенности. Бытовые ноутбуки вообще не содержат стандартные физические СОМ-порты. Общепринятым и наиболее удобным решением является использование специальных микросхем-конвертеров. При подключении такой микросхемы к порту USB операционная система компьютера создает виртуальный СОМ-порт, который с точки зрения прикладных программ ничем не отличается от физического. Через этот порт вы можете записывать прошивку в микроконтроллер или настраивать различные параметры.
Использовать конвертер, встроенный на плату, удобнее, чем постоянно подключать внешний. Но есть важный нюанс: как показал опыт множества пользователей, если забыть отключить от контроллера провод USB, то можно легко вырвать с платы разъем microUSB. Это не означает необратимую поломку платы, в крайнем случае можно будет использовать внешний адаптер. Но все равно, будьте аккуратны и внимательны.
Встроенная флеш-память для ведения логов(8) есть не на каждом полетном контроллере и для обычных полетов также не требуется. Но ее наличие удобно в более сложных случаях, когда надо проанализировать в динамике бортовое напряжение питания, маршрут и параметры полета или отладить прошивку. На плату контроллера могут быть также встроены приемник радиоуправления, приемник GPS, передатчики видеосигнала и/или телеметрии, LCD-дисплеи и т. д., но это уже комбинированные устройства. Мы рассмотрим дополнительные модули в отдельной главе.
Комплект аппаратуры радиоуправления — это, зачастую, самый дорогой компонент радиоуправляемой системы. Но экономить на нем крайне нежелательно. В радиоаппаратуру обязательно должна быть заложена возможность развития конструкции вашего квадрокоптера, в противном случае сиюминутная экономия может обернуться дополнительными расходами спустя один-два года. Причем управление квадрокоптером высоко поднимает планку минимальных требований по сравнению с самолетами и даже вертолетами.
В общем случае аппаратура радиоуправления состоит из пульта радиоуправления (передатчика) и приемника. Основными параметрами являются протокол кодирования сигнала и количество каналов передачи команд. Рабочую частоту мы не рассматриваем, т. к. в настоящее время практически вся аппаратура работает на частоте 2,4 ГГц, и другие варианты скорее относятся к экзотическим явлениям, хотя при дальних полетах по FPV применяется и аппаратура с рабочими частотами 40 и 72 МГц, сигналы которых меньше подвержены затуханию и интерференции на сложных рельефах. Протокол кодирования сигнала означает способ, которым команды, полученные с органов управления пульта, "упакованы" в поток данных, проходящий через радиоканал. При разработке протоколов руководствуются помехоустойчивостью и плотностью потока информации. Существуют как проприетарные протоколы, которые использует только один производитель аппаратуры, так и более массовые. Каждый из них имеет свои достоинства и недостатки.
Подробный разбор и анализ протоколов вряд ли уместен в книге для начинающих.
На первом этапе протокол, как таковой, вообще не будет иметь значения. Заострим ваше внимание лишь на том, что протокол передатчика и протокол приемника должны быть одинаковыми . Это кажется очевидным, но по невнимательности вполне можно купить неподходящий приемник. Например, если ваш передатчик работает с протоколами DSM2/DSMX, нужно искать приемник именно для этих протоколов. Существуют передатчики со сменными передающими модулями, а также поддерживающие разные протоколы. Это особенно удобно, когда надо приобрести передатчик, совместимый с уже имеющимся квадрокоптером заводского изготовления или разными приемниками.
Читать дальшеИнтервал:
Закладка:









