В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Есть и другие положительные моменты в использовании акселерометра. Предположим, командой с пульта мы наклонили квадрокоптер для полета вперед. Чтобы компенсировать уменьшение вертикальной тяги, необходимо равномерно увеличить обороты всех моторов пропорционально наклону. При отсутствии акселерометров можно приблизительно вычислить наклон квадрокоптера через угловое ускорение, его продолжительность и величину управляющего сигнала с пульта. Но проще и точнее угол наклона вычисляется по данным с акселерометров.
Разумеется, акселерометры измеряют не только ускорение свободного падения, но и линейные ускорения по любой из осей при движении квадрокоптера. В ряде случаев эта информация тоже бывает полезна.
С другой стороны, когда надо быстро определить скорость и знак углового ускорения, проще использовать гироскоп, который так же выдает эти данные более точно и в готовом виде. Таким образом, каждый сенсор хорош для своей задачи. В современных MEMS-микросхемах трехосевые гироскопы и трехосевые акселерометры часто объединяют в одном корпусе с размерами около 3x3x1 мм. В этом же корпусе находится электронная схема для предварительной цифровой обработки данных, с внешним протоколом обмена SPI или I 2С.
Чтобы определить курсовое направление рамы квадрокоптера, нужен еще один датчик — интегральный компас , или магнитометр . Квадрокоптер может лететь как угодно, вбок, назад, или по диагонали, поэтому "вперед" в нашем случае — это условное направление рамы и контроллера, относительно которого определяется фактическое направление полета. На плате контроллера направление "вперед" обычно обозначается стрелкой.
Принцип работы интегрального магнитометра (компаса)
В основе конструкции интегрального магнитометра (рис. 2.4) лежит анизотропный магниторезистивный эффект. Чувствительный элемент изготавливается из пермаллоевой пленки, способной изменять свое сопротивление в зависимости от направления протекающего через нее тока и направления вектора ее намагниченности. В свою очередь, вектор намагниченности пленки определяется направлением силовых линий магнитного поля, в котором находится чувствительный элемент.
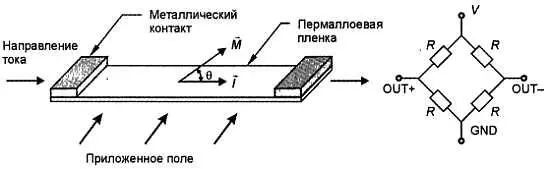
Рис. 2.4. Устройство интегрального магнитометра
Четыре пермаллоевых элемента соединяются в измерительный мост (см. рис. 2.4). При подаче постоянного напряжения на мост датчик начинает измерять интенсивность внешнего магнитного поля, направленного вдоль его чувствительной оси. Мостовой датчик имеет ось предпочтительного намагничивания, так называемую легкую ось, и наиболее чувствителен к полям, направленным перпендикулярно этой оси. В квадрокоптерах применяются трехосевые интегральные магнитометры, состоящие из трех независимых датчиков, ориентированных по трем ортогональным осям и электронной схемы. В спецификации магнитометра всегда указывают направление осей относительно корпуса (рис. 2.5).
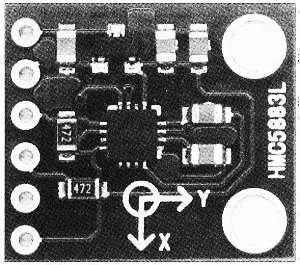
Рис. 2.5. Магнитометр HMC5883Lна плате расширения
Магнитометры не подвержены вибрации, но на их показания влияют внешние близко расположенные металлические предметы. Помехи можно разделить на три основных класса.
• "Искажения твердого железа" (Hard Iron Distortion) — к магнитному полю земли добавляется постоянное магнитное поле от намагниченных предметов, например магнита звукоизлучателя. Намагниченными могут быть даже выводы радиодеталей, изготовленные из луженого железа. Эта постоянная составляющая может быть исключена при калибровке.
• "Искажения мягкого железа" (Soft Iron Distortion) — магнитное поле искажается посторонними предметами, не имеющими собственной намагниченности. Например, сплавы никеля, пермаллой искажают силовые линии поля. Такие искажения зависят от положения объекта в пространстве и труднее компенсируются. К счастью, в конструкции квадрокоптера обычно не бывает таких предметов. Детали из сплавов алюминия и меди не вносят искажения.
• Динамические или вихревые помехи. Это специфическая особенность электрических летательных аппаратов, особенно коптеров. Мощные токи, протекающие через проводники силовых цепей и батарею, порождают магнитные поля в окружающем пространстве. Причем напряженность этих полей постоянно меняется в зависимости от нагрузки на моторы.
Иногда магнитные помехи настолько сильны, что делают невозможным использование компаса и даже способны привести к аварии. К сожалению, переменные магнитные поля невозможно скомпенсировать программно и приходится применять специальные конструктивные меры. Для уменьшения наводок микросхему компаса стараются выносить с платы контроллера и поднимать вверх на 10–20 см над рамой. При укладке силовых проводов следует избегать образования петель, все провода должны иметь минимальную длину. Силовые провода рекомендуется перекручивать. Впрочем, в квадрокоптерах начального уровня вполне можно обходиться без компаса и при наличии магнитных помех просто отключать его в настройках.
Малогабаритные контроллеры, предназначенные для полетов внутри помещения, по очевидной причине компас не содержат.
Перед началом полетов магнитометр необходимо откалибровать, проведя процедуру вращения коптера по всем осям. Детали этой процедуры могут зависеть от применяемой прошивки контроллера.
Благодаря наличию компаса возможен интересный режим полета, именуемый Headfree. В этом режиме фиксируется курсовое положение квадрокоптера в момент активации моторов. Если в процессе полета развернуть раму квадрокоптера по Yaw, то условное направление "вперед", зафиксированное при взлете, не изменится. При наклоне правого стика пульта вперед квадрокоптер всегда будет лететь вперед, при наклоне вправо — всегда вправо и т. д., независимо от того, как в данный момент развернута рама. Считается, что этот режим удобен для начинающего пилота, а также при полетах на большом удалении, без видеоканала и средств телеметрии, когда визуальный контроль над положением рамы затруднен. Если пилот случайно развернул квадрокоптер, то это не отразится на управлении и поможет избежать аварии.
Используя компас, при настройке квадрокоптера не забудьте указать такой параметр, как магнитное склонение (не путайте с магнитным наклонением) для своей местности. Магнитное склонение — это угол между географическим и магнитным меридианами в точке земной поверхности. Магнитное склонение считается положительным, если северный конец магнитной стрелки компаса отклонен к востоку от географического меридиана, и отрицательным — если к западу. Значение магнитного склонения используется для определения истинного меридиана до показанию магнитного компаса. Узнать значение магнитного склонения для своей местности можно на сайте www.magnetic-declination.comили http://www.ngdc.noaa.gov/geomag-web/. Обратите внимание, что сервисы дают значение в градусах и минутах, но при настройке компаса используется значение в градусах и десятичных долях градуса.
Читать дальшеИнтервал:
Закладка:









