В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Обратимся к столбцу Коптерв результатах расчета. При общем весе ВМГ 788 г расчетная полезная нагрузка составила 955 г, т. е. максимальный расчетный полетный вес, при котором ток и температура не выходят за пределы допустимых, составляет 788 + 955 = 1743 г. Полетный вес имеющегося коптера 1200 г, значит, мы можем добавить еще 543 г полезной нагрузки. Надо полагать, что если полетный вес коптера будет соответствовать предельному, мы как раз получим расчетное укороченное время полета.
Теперь проведем эксперимент. Увеличим размер пропеллера до 12x4,7. Мы видим, что потребляемый от батареи ток несколько увеличился, но при этом время полета возросло. Это говорит о том, что повысилась эффективность работы ВМГ. И действительно, для двигателя AX-2810Q с kV = 750 пропеллер 11x4,7 слишком мал и не позволяет развить оптимальную тягу. Полевые испытания с. пропеллерами 12x4,5 полностью подтвердили расчеты. Среднее время смешанного полета увеличилось примерно на 3 минуты.
Дальнейшее увеличение размера пропеллера до 14x4,7 приводит к возрастанию времени висения, но снижает время активного полета. Это связано с большой инерцией вращений винтов. Стабилизация коптера, как вы знаете, происходит за счет быстрого и точного управления оборотами двигателей. С увеличением размера быстро нарастают пиковые токи через двигатели и регуляторы, которые вынуждены резко разгонять и тормозить тяжелые "маховики" пропеллеров. Это увеличивает расход энергии при активном пилотировании. Увеличивается гироскопический эффект пропеллеров. В целом коптер становится более плавным и вялым в управлении. Поэтому пропеллеры большого диаметра применяются в основном для аэровидеосъемки при стабильном и плавном полете.
Примечание
Когда работа над книгой подходила к завершению, возобновил свою работу сайт российского калькулятора www.rc-calc.comИнтерфейс этого сайта проще и понятнее для новичков; сайт позволяет авторизоваться через аккаунты в соцсетях или Google, хранить данные своих коптеров и обмениваться ссылками на результаты расчетов. К тому моменту, когда вы будете читать эту книгу, сайт наверняка будет наполнен достаточным количеством исходных данных для расчетов.
Теперь, когда вы поняли основные принципы подбора компонентов, поэкспериментируйте с различными пропеллерами, моторами и батареями. Обратите особое внимание на то, в каких случаях нагрузки выходят за пределы допустимого. Постепенно вы начнете интуитивно чувствовать оптимальное сочетание компонентов и без программы расчета. Простое увеличение емкости батареи не обязательно увеличит время полета, т. к. возрастет вес батареи. Соответственно, для новой батареи может понадобиться изменить ВМГ.
Выбор конструкционных материалов во многом зависит от разумно заданной стойкости к авариям. Мы исходим из того, что аварии случаются даже у опытных пилотов, а в период обучения без них не обойтись.
Стойкой к авариям является не та конструкция, которая вообще не ломается при падении — так не бывает, а та, у которой ущерб после падения минимален. Поэтому важной частью стойкой конструкции является наличие разрушаемых элементов. Эти элементы должны иметь минимальную стоимость и сложность изготовления. Разрушаясь, они поглощают энергию деформации и сохраняют в целости дорогие и важные узлы. В ряде случаев используются подпружиненные элементы.
Классическим примером поглощающего узла являются посадочные стойки. Их намеренно делают упругими и прочными ровно настолько, чтобы при сильном ударе о землю они поглотили максимум энергии, но не передали деформацию дальше, а в крайнем случае сломались сами. В общем случае, прочность элементов конструкции должна нарастать от периферии к центру. Сначала должны идти амортизирующие элементы, затем сминаемые и далее несущие и критически важные. Здесь просматривается аналогия с пассивной безопасностью автомобиля, у которого сначала идут амортизирующие бамперы, затем сминаемые зоны моторного отсека и багажника, а потом усиленный стальными трубами салон.
Примером неудачной, с точки зрения стойкости к авариям, конструкции квадрокоптера является сочетание прочных монолитных лучей и прослабленного чрезмерно большими прорезями и отверстиями центра рамы. При ударе лучом о землю вся энергию удара передается на центральную часть, ломая ее на куски. При этом могут пострадать и электронные узлы. После аварии потребуется долгий и сложный ремонт рамы, тогда как сломанный луч можно заменить даже в полевых условиях, а погнутый просто выправить. Ослабление центра рамы относительно лучей не дает заметного выигрыша по весу, но существенно снижает стойкость. Поэтому лучше сделать прочный центр рамы, а лучи облегчить фрезерованием или высверливанием. Сказанное не относится к рамам, у которых центр и лучи из карбона. Такие рамы почти неразрушаемы, но стоят достаточно дорого.
Еще одним разрушаемым элементом является нейлоновый крепеж : — винты, гайки, стойки. Их нежелательно применять для крепления лучей и монтажа нагруженных элементов конструкция в тяжелых коптерах, но для крепления электронных узлов, антенн и небольших видеокамер они подходят хорошо. При аварии с деформацией рамы нейлоновые винты легко срезаются или срываются и плата или антенна просто отлетает в сторону, оставаясь целой. В случае использования прочного металлического крепежа можно получить плату полетного контроллера с отломленными углами или даже треснувшую по диагонали. Особенно сложны в диагностике визуально незаметные скрытые трещины платы с разрывом проводников. Применение нейлонового крепежа также дает экономию веса, которая очень важна для небольших коптеров.
Расцепляемые электрические разъемы тоже вносят свой вклад в безопасность. Кроме традиционных для авиамодельного оборудования штыревых рядных разъемов все чаще применяются миниатюрные разъемы типа MOLEX. Оба типа разъемов не разрушаются и не повреждают плату при разъединении рывком во время аварии, но обеспечивают надежный контакт во время эксплуатации. Поэтому не следует дополнительно фиксировать разъемы в гнезде при помощи термоклея или металлических скобок. Иначе вероятность после аварии получить вырванные с платы вместе с кусками дорожек гнезда разъемов будет существенно выше, чем вероятность пропадания контакта в полете.
Силовые провода от распределителя питания к регуляторам и от регуляторов к моторам следует соединять только пайкой (рис. 4.1).
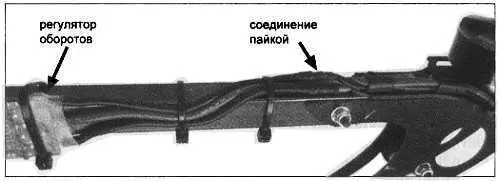
Рис. 4.1. Пример монтажа двигателя с укладкой провода снаружи луча
Читать дальшеИнтервал:
Закладка:









