В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Для квадрокоптера сервомашинки не являются обязательным компонентом. В базовой конструкции они не нужны, и даже в подвесах камеры все чаще используются специальные бесколлекторные двигатели. Но в любом случае устройство сервомашинок полезно знать для общей эрудиции.
Сервомашинка представляет собой классическое электромеханическое устройство с обратной связью (рис. 317). Она состоит из электромотора, редуктора, потенциометра обратной связи и платы управления. Сервомашинки разделяются на аналоговые и цифровые в зависимости от устройства узла управления. В цифровых сервомашинках применяется встроенный микроконтроллер.
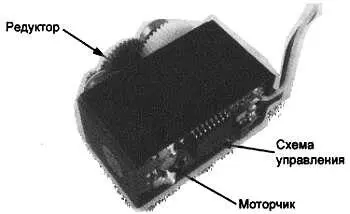
Рис. 3.17. Устройство обычной сервомашинки
Потенциометр обратной связи механически напрямую связан с выходным валом сервомашинки, и положение бегунка потенциометра отражает для схемы управления положение вала. На схему управления сервомашинкой с одного из каналов приемника или с выхода полетного контроллера поступают стандартные импульсы радиоуправления, структуру и параметры которых мы уже рассмотрели ранее.
Каждый входящий импульс радиоуправления запускает встроенный генератор однократного опорного импульса внутри сервомашинки. Длительность внутреннего опорного импульса зависит от положения бегунка потенциометра. Электронная схема управления сравнивает длительности входящего и опорного импульсов. Если они совпадают, то ничего не происходит. Если же длительности различаются, то вырабатывается разностный сигнал с положительным или отрицательным знаком. Этот сигнал поступает на схему управления мотором, который начинает вращаться в сторону уменьшения разности импульсов, поворачивая через редуктор выходной вал и движок потенциометра. Как только длительности управляющего и опорного импульсов совпадают, мотор останавливается.
Таким образом, угловое положение вала сервомашинки всегда соответствует положению ручек управления на пульте либо управляющему сигналу полетного контроллера. Если же к валу сервомашинки прикладывается внешнее усилие, то малейшее смещение вала относительно заданного положения приводит к появлению сигнала рассогласования, и сервомашинка возвращает вал в заданное положение. Но так идеально машинка работает только в теории. На практике механическая часть обладает инерцией, и даже после отключения питания мотора он поворачивается немного больше, чем нужно — вал проскакивает заданное положение. Электроника отрабатывает возврат, и механика вновь проскакивает немного больше, чем нужно, но уже в обратную сторону, и все повторяется. В итоге возникает циклическое автоколебательное дрожание вала, так называемый джиттер. Чтобы подавить джиттер, вводят так называемую "мертвую зону", внутри которой электроника не обращает внимания на разностный сигнал, полагая, что он равен нулю и вал точно стоит в заданном положении. Но слишком большая "мертвая зона" снижает точность управления. Подавления джиггера при узкой мертвой зоне добиваются, используя прецизионные шестеренки редуктора и высокоточные потенциометры обратной связи, а также оптимизируя сервомашинки под определенное напряжение питания.
Если на вход сервомашинки приходит сигнал нестандартной длительности, например, в результате воздействия помехи, то вал сервомашинки резко проворачивается в крайнее положение и там упирается в ограничитель. К поломке сервомашинки это не приводит, но резко возрастает ее потребляемый ток, а внезапный уход в крайнее положение может привести к порче внешних механических компонентов модели или к аварии. Этого недостатка лишены цифровые сервомашинки. Микроконтроллер игнорирует заведомо ошибочный входной сигнал, не меняя положение вала.
Кроме того, в цифровых сервомашинках естественным образом реализуется последовательный протокол S.Bus/S.Bus2 или аналогичный. Благодаря этому можно каждой сервомашинке присвоить свой уникальный адрес и соединить их все одной последовательной сигнальной шиной. Также к достоинствам цифровых сервомашинок можно отнести высокое быстродействие и точность, т. к. аналоговая схема считывает положение вала потенциометра и управляет двигателем только по приходу управляющего импульса, а цифровая схема делает это намного чаще. Недостатками цифровых сервомашинок являются более высокая цена и необходимость программировать их при помощи специального программатора.
Важно иметь в виду, что цифровые сервомашинки питаются от более высокого напряжения, чем аналоговые: 6 или 7,4 В вместо 5 В. Попытка включить обычную машинку вместо цифровой приведет к выходу аналоговой машинки из строя. Потенциометр сервомашинки подвержен механическому износу, истиранию резистивного слоя в районе центрального положения, поэтому по мере эксплуатации возрастает погрешность сервомашинки и джиттер. Но это становится заметно по прошествии минимум десяти часов непрерывной эксплуатации. Как правило, раньше происходит разрушение пластикового редуктора машинки вследствие аварии. Сервомашинки, рассчитанные на повышенные механические нагрузки, делают с металлическими редукторами.
Часть II. ПРАКТИКА
Глава 4. Подготовка к изготовлению квадрокоптера
Прежде всего, необходимо определиться с размером конструкции, который принято выражать в расстоянии между осями моторов по диагонали. При изготовлении самого первого коптера лучше избегать крайних проявлений — наладонных нанокоптеров или конструкций с диагональю более 700 мм и весом более 2 кг. Размер диагонали рамы самых распространенных коптеров для обычного любительского применения лежит в пределах от 250 до 600 мм.
Типоразмер 450 мм оптимален с точки зрения экономичности компонентов и простоты изготовления. В свою очередь, коптеры размером 600 мм более стабильны в полете, способны нести больше полезной нагрузки и дают больше возможностей для развития конструкции в перспективе, ими легче управлять визуально, потому что они крупнее. Рамы размером менее 450 мм нежелательно использовать для обучения пилотированию "с нуля", т. к. неопытному пилоту сложно визуально определить положение небольшого коптера в пространстве.
Важным фактором в подборе компонентов коптера являются финансовые возможности пилота, поэтому дать универсальный рецепт невозможно. Мы будем исходить из скромных возможностей школьника или студента, а читатель может масштабировать меру своих затрат самостоятельно.
Примечание
С точки зрения экономии средств и времени обычно выгоднее покупать узлы и компоненты в виде целевых наборов: набор для сборки рамы, набор моторов и регуляторов, набор из передатчика и приемника и т. д. Как правило, наборы стоят на 20–30 % дешевле, чем при покупке компонентов по отдельности.
Читать дальшеИнтервал:
Закладка:









