В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Барометр, акселерометр и компас,как правило, используются штатные, установленные на плату полетного контроллера. Полетный контроллер транслирует полученные и обработанные данные в модуль телеметрии.
Модуль GPSобычно тоже подключается к полетному контроллеру, который обрабатывает поток протокола NMEA, выделяет из него координаты и на их основании вычисляет количество спутников, линейную скорость и дистанцию до точки взлета для включения в поток данных телеметрии. Современные прошивки позволяют подключить модуль GPS непосредственно к модулю телеметрии, но в случае с квадрокоптером это не имеет практического смысла — данные GPS нужны в первую очередь полетному контроллеру.
Радиоприемникгенерирует сигнал RSSI (Received Signal Strength Indication — индикация уровня принимаемого сигнала) для оценки уровня радиосигнала, поступающего на антенный вход приемника. Сигнал RSSI может присутствовать на выходе приемника в виде постоянного напряжения, пропорционального уровню принимаемого сигнала, или передаваться в стандартной форме через один из выходных каналов управления РРМ или SBUS. В первом случае модулю телеметрии достаточно измерить напряжение, во втором нужно распознавать сигнал радиоуправления, что требует несколько больших ресурсов. К сожалению, дешевые популярные приемники редко оснащены выходом RSSI, хотя их чипсет имеет такую возможность. Некоторые приемники можно прошить альтернативной прошивкой, которая выводит сигнал RSSI в качестве отдельного канала. Также приемник является источником данных о положении рукояток управления, но эти данные обрабатывает и выводит в поток телеметрии полетный контроллер.
Полетный контроллертакже является источником собственных данных: режим полета, обороты двигателей, наличие ошибок в шине данных I 2С, время полета.
Изображенный на рис. 3.9 вариант реализации телеметрии с использованием OSD наиболее популярен, особенно среди начинающих пилотов. Более того, он просто необходим при полетах по камере, иначе полет с большой вероятностью закончится разряженной батареей или потерей ориентации и утратой коптера. Поэтому мы рассматриваем модуль OSD как часть системы телеметрии.

Рис 3.9. Стандартная система телеметрии с применением OSD
Внешние данные в модуль OSD (рис. 3.10) могут поступать с полетного контроллера через последовательный интерфейс, непосредственно от внешних датчиков, либо одновременно из разных источников.
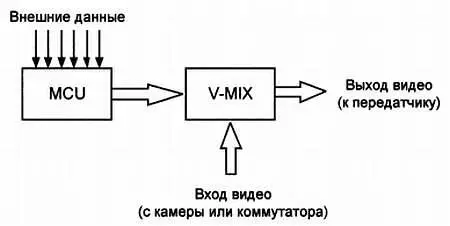
Рис. 3.10. Структурная схема модуля OSD
Собственный микроконтроллер модуля (MCU) обрабатывает данные и загружает их в специальную микросхему — видеомиксер (V-MIX), который накладывает цифробуквенную и графическую информацию на изображение. Существует несколько пользовательских прошивок для модулей OSD, позволяющих подбирать и настраивать отображение данных под свои нужды. Для настройки обычно применяется интерфейсная программа на компьютере с подключением через USB-адаптер последовательного порта.
Достоинством телеметрии с применением OSD является наглядность и удобство отображения информации, а также то, что для телеметрии используется уже имеющийся канал. Однако иногда требуется принимать, отображать и/или записывать в лог более специфическую информацию типа оборотов двигателей, показаний акселерометров и т. д. В этом случае можно приобрести, в зависимости от ситуации и финансовых возможностей, либо комплект сменных модулей приемника/передатчика, типа FrSky, создающих двунаправленный радиоканал для передачи управления на борт и приема телеметрии с борта, либо фирменное оборудование со встроенным каналом телеметрии.
Можно также ничего не менять в имеющейся аппаратуре управления, а приобрести недорогой комплект из двух модулей для передачи потока информации с последовательного порта — так называемый радиомодем. Автор предпочитает именно это недорогое и универсальное решение.
В большинстве случаев полный поток данных телеметрии выводится на один из последовательных портов полетного контроллера. Причем на этот порт выводится не только стандартная телеметрия, но и внутренняя служебная информация контроллера (время исполнения цикла программы, наличие ошибок на шине I 2С, положение рукояток пульта и т. д.) Также через этот порт можно "на лету" настраивать контроллер, меняя различные параметры. Более того, у многих полетных контроллеров через этот же порт можно управлять коптером со смартфона или компьютера, минуя аппаратуру радиоуправления.
На земле к последовательному порту контроллера через проводной адаптер USB-СОМ можно подключить стационарный компьютер или ноутбук, а через адаптер OTG легко подключаются планшет или смартфон с операционной системой Android. Разумеется, стационарный компьютер, ноутбук или смартфон можно подключить через Bluetooth. Но увы, дальность действия стандартного оборудования Bluetooth не превышает 100 м на открытой местности, а для надежной работы желательно не превышать дистанцию 30 м.
Для увеличения дальности беспроводного соединения через последовательный порт контроллера применяют специальное оборудование — радиомодем. Последовательный порт одного из приемопередатчиков радиомодема соединяется с портом полетного контроллера, а к порту второго приемопередатчика подключается наземное оборудование. Радиоканал абсолютно прозрачный ; т. е. с точки зрения наземного оборудования это выглядит так, будто оно подключено напрямую к последовательному порту контроллера, хотя на самом деле квадрокоптер может находиться на расстоянии нескольких километров от оператора. Единственное ограничение состоит в снижении максимальной скорости порта, и чем больше предполагаемая дистанция полета, тем меньшая скорость обмена должна быть задана в настройках.
Как показывает опыт, скорости 19 200 бод достаточно для комфортного обмена данными. Даже скорость 9600 бод допустима для приема потока расширенной телеметрии и дистанционного изменения настроек. При этом современные недорогие радиомодемы обеспечивают стандартную скорость 57 600 бод на расстоянии около 1 км. В настоящее время скорость и дальность действия радиомодемов не является проблемой для любительских коптеров.
Типичный современный модуль радиоканала состоит из специализированной микросхемы, оснащенной интерфейсом последовательного порта UART/RS232 и радиочастотным выходом. Модули повышенной мощности имеют также антенный усилитель мощности излучаемого радиосигнала. Существуют модули со встроенным адаптером USB-COM для подключения непосредственно к USB-порту компьютера.
Читать дальшеИнтервал:
Закладка:









