Юрий Ревич - Занимательная электроника

- Название:Занимательная электроника
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2015
- Город:Санкт-Петербург
- ISBN:978-5-9775-3479-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Юрий Ревич - Занимательная электроника краткое содержание
На практических примерах рассказано о том, как проектировать, отлаживать и изготавливать электронные устройства в домашних условиях. От физических основ электроники, описания устройства и принципов работы различных радиоэлектронных компонентов, советов по оборудованию домашней лаборатории автор переходит к конкретным аналоговым и цифровым схемам, включая устройства на основе микроконтроллеров. Приведены элементарные сведения по метрологии и теоретическим основам электроники. Дано множество практических рекомендаций: от принципов правильной организации электропитания до получения информации о приборах и приобретении компонентов применительно к российским условиям. Третье издание дополнено сведениями о популярной платформе Arduino, с которой любому радиолюбителю становятся доступными самые современные радиоэлектронные средства.
Для широкого круга радиолюбителей
Занимательная электроника - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Точность АЦП номинально составляет ±2 LSB, плюс еще 0,5 LSB за счет нелинейности по всей шкале. То есть фактически такой АЦП с точки зрения абсолютной точности соответствует 8-разрядному. При соблюдении всех условий эту точность, впрочем, можно повысить, правда, условия довольно жесткие и включают в себя как «правильную» разводку выводов АЦП, так и, например, требование остановки цифровых узлов на время измерения, чтобы исключить наводки (специальный режим ADC Noise Reduction , которого мы здесь касаться не будем).
Чтобы не углубляться в детали этого процесса и не усложнять задачу, мы в дальнейшем поступим проще: предпримем ряд мер, чтобы обеспечить стабильность результата, а абсолютную ошибку скомпенсируем за счет калибровки, которая все равно потребуется. Для этой цели погрешности встроенного АЦП нам хватит и без особых ухищрений, важно только, чтобы показания не «дребезжали». Уменьшение дребезга почти до нуля у нас будет достигаться тем, что, во-первых, на входе канала мы поставим конденсатор для фильтрации неизбежных в совмещенных аналого-цифровых схемах наводок на внешние цепи (фирменное руководство рекомендует еще последовательно с ним включать индуктивность порядка 10 мкГн, но мы без этого обойдемся). Во-вторых, мы будем измерять несколько раз и усреднять значения отдельных измерений.
АЦП в МК AVR могут использовать три источника опорного напряжения на выбор: внешний, встроенный и напряжение питания аналоговой части. Последний вариант, как самый простой, мы и применим — все равно подгонкой масштабов мы заниматься не будем, а все рассчитаем в цифровом виде. Отметим, что выводы аналогового питания сделаны отдельно от цифрового (хотя в простейших случаях это может быть и одно и то же питание, но мы их также разделим). Применение встроенного опорного источника при нестабильном общем питании мы рассмотрим в главе 22 на примере Arduino .
Пару слов о самой организации измерений. АЦП последовательного приближения (см. главу 17 ) должен управляться определенной тактовой частотой, для чего в его состав входит делитель тактовой частоты самого МК, подобный предделителю у таймеров. Рекомендуется подбирать этот коэффициент деления так, чтобы тактовая частота АЦП укладывалась в промежуток от 50 до 200 кГц. Например, для тактовой частоты МК 4 МГц подойдет коэффициент деления 32, тогда частота АЦП составит 125 кГц. Преобразование может идти в непрерывном режиме (после окончания преобразования сразу начинается следующее), запускаться автоматически по некоторым прерываниям (не для всех типов AVR) или каждый раз запускаться по команде. Мы воспользуемся только последним «ручным» режимом, т. к. нам для осреднения результатов тогда удобно будет точно отсчитывать число преобразований. В таком режиме на одно преобразование уходит 14 тактов, потому для приведенного примера с частотой 125 кГц время преобразования составит приблизительно 9 мс.
По окончании процесса преобразования возникает прерывание АЦП, в обработчике которого результат измерения читается из соответствующих регистров. Поскольку число 10-разрядное, то оно займет два байта, у которых старшие 6 разрядов равны нулю. Это удобно, т. к. мы можем без опасений суммировать до 64 (2 6) результатов в рамках двухбайтового числа, не привлекая дополнительных регистров, и затем простым сдвигом, как мы обсуждали ранее, вычислять среднее.
Аналоговая часть схемы измерения температуры совпадает с описанной в главе 17 , за исключением диапазона выходных сигналов и, соответственно, несколько иных параметров. Чтобы использовать диапазон встроенного АЦП полностью, нам надо подавать сигнал от 0 до 5 В (точнее, до значения опорного напряжения, которое здесь совпадает с аналоговым питанием), причем с отрицательными напряжениями на входе в данном случае АЦП работать «не умеет» (в некоторых моделях AVR есть АЦП с дифференциальным режимом, и даже с предварительными усилителями, но точность при этом значительно снижается). При указанных на схеме (рис. 20.4) номиналах резисторов диапазон выходных напряжений всей схемы составит около 4,9 В, т. е. мы задействуем весь диапазон АЦП с некоторым запасом. Резистор R4, который устанавливает нижнюю границу диапазона, нужно выбирать равным не сопротивлению датчика при 0°, как в схеме по рис. 17.9, а равным его сопротивлению при нижней требуемой температуре.
С датчиком атмосферного давления все еще проще — ряд фирм выпускают готовые датчики давления. Мы возьмем барометрический датчик МРХ4115 фирмы Motorola , питающийся от напряжения 5 В и имеющий удобный диапазон выхода примерно от 0,2 до 4,6 В. При этом учтем, что большая абсолютная точность нам не требуется, только стабильность — для небольших высот над уровнем моря можно считать, что при изменении высоты на каждые 10–12 м давление меняется примерно на 1 мм рт. ст. Так что в пределах такого города, как Москва, с естественными перепадами высот до 100 и более метров [38] Самое высокое место Москвы — в районе Тёплого Стана, лежит на высоте 255 м над уровнем моря, самое низкое — в пойме Москвы-реки — 117 м.
, оно само по себе будет «гулять» в пределах как минимум 10 мм рт. ст., даже без учета этажности зданий. И нам все равно целесообразно будет подогнать результат «по месту» так, чтобы не иметь крупных расхождений с прогнозом погоды по телевидению, — иначе показания прибора окажутся никому не нужны.
Схема
С учетом всего сказанного схема термометра-барометра будет выглядеть так, как показано на рис. 20.4 (напомним, что ОУ МАХ478 можно заменить, например, на ОР293, см. главу 12 ). Чтобы не загромождать схему, здесь не показан узел индикации, т. к. он аналогичен тому, что используется в часах из предыдущего раздела, за исключением того, что должен содержать не четыре, а шесть разрядов (показания в формате «33,3»° и «760» мм рт. ст.). К ним можно добавить постоянно горящие индикаторы, показывающие единицы измерения, подобно тому, как это делалось в главе 17 (рис. 17.9).
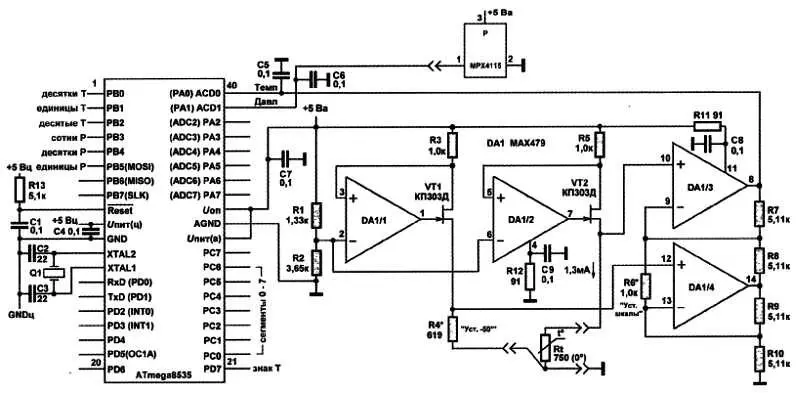
Рис. 20.4. Схема измерителя температуры и давления на МК ATmega8535
На рис. 20.5 показан внешний вид табло такого измерителя, где дополнительные индикаторы изготовлены на основе шестнадцатисегментных PSA-05 красного свечения, в то время как основные семисегментные цифры — зеленого свечения. Минус, как и в главе 17 , изготовлен из плоского светодиода.
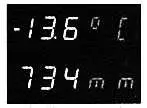
Рис. 20.5. Размещение индикаторов измерителя температуры и давления
Читать дальшеИнтервал:
Закладка: