Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника

- Название:Простые роботы своими руками или несерьёзная электроника
- Автор:
- Жанр:
- Издательство:СОЛОН-Пресс
- Год:2016
- Город:Москва
- ISBN:978-5-91359-185-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника краткое содержание
Книга состоит из описаний простых конструкций, содержащих электронные компоненты. Тематика изделий — электронные игрушки и сувениры.
Содержание книги является логическим продолжением содержания двух первых книг — «Роботы своими руками. Игрушечная электроника» и «Игрушечная электроника NEXT», опубликованных в издательстве СОЛОН-ПРЕСС.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий.
Простые роботы своими руками или несерьёзная электроника - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В конструкции допустимо применение резисторов MЛT, С2-23, R2 — его номинал может быть в интервале 1…10 кОм. Транзистор С3199 заменим отечественными транзисторами КТ315Б, КТ315Г, или любым из серии КТ3102. Вместо транзистора КТ815В подойдут и транзисторы серии КТ315. Трансформатор намотан вдвое сложенным проводом ПЭЛ-0,2 (25 витков) на магнитопроводе К7х5,5х2 из феррита с проницаемостью 1000…2000. Диод Шоттки можно использовать импортный, серий 1N5818, 1N5817 или 1N5819, или заменить обычным серии Д220, Д223.
Пограничник
Концепт этого робота подробно изложен в моей книге «Роботы своими руками. Игрушечная электроника» (СОЛОН-ПРЕСС, 2015, с.87). Отличие данной конструкции состоит в существенном упрощении ходовой части и схемного решения изделия. Как и предыдущая поделка, при освещении полигона внешним источником света робот движется вдоль границы белого и чёрного полей.
Внешний вид игрушки изображен на рисунке 6. Это хорошо известная всем опорная «трёхточка». Две точки образуют валы двигателей, третья — проволочная скоба. Поочерёдно переключаясь, моторы заставляют робота двигаться по криволинейной траектории на плоскости.
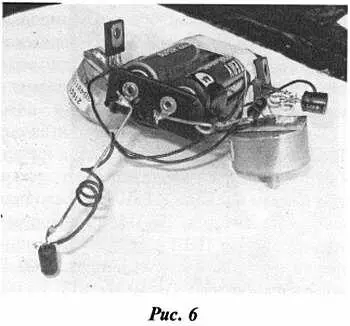
Схема управления двигателями дана на рис. 7. После включения питания, в зависимости от освещённости фототранзистора VT1, включается либо мотор M1, либо мотор М2. Так, если фотодатчик находится над светлой поверхностью, сопротивление перехода фототранзистора мало, открывающий ток поступает на базу транзистора VT2. Сопротивление коллектор — эмиттерного перехода уменьшается и включается М1.
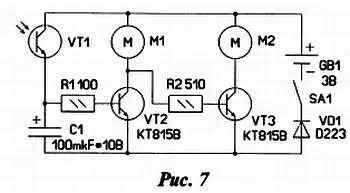
База транзистора VT2 через резистор R2 и открытый переход транзистора VT1 замкнута на «минус», поэтому транзистор закрыт и ротор двигателя М2 неподвижен. Робот начинает разворачиваться.
При заходе датчика на чёрное поле, сопротивление его возрастает до многих десятков кОм, и транзистор VT2 закрывается. База транзистора VT3 через резистор R2 и обмотку двигателя М1 оказывается подключённой к «плюсу» питания. Мотор М2 запускается, и робот разворачивается в противоположном направлении. При выходе робота на белое поле цикл повторяется. Таким образом, он движется вдоль границы раздела белого и чёрного полей. Конденсатор С1 задаёт инерционность «принятию решений» робота о развороте. При его отсутствии пограничник может замереть ровно на границе и далее не станет двигаться. Диод VD1 снижает напряжение питания двигателей, создавая иллюзию вальяжного, неспешного движения робота вдоль границы.
Конструктивные особенности реализации игрушки поясняют рисунок 8 и рисунок 9. Каркас (элементы 5, 6 ) изготовлен из проволоки трёх канцелярских скрепок. Две контактные планки (элемент 9 ) служат для соединения двигателей и каркаса в одно целое. Они изготовлены из односторонне фольгированного гетинакса. Их размеры 10x25 мм.
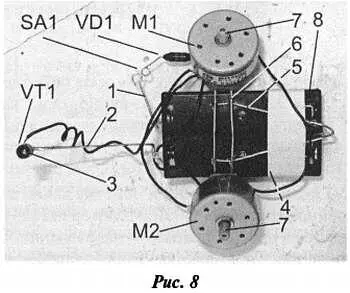
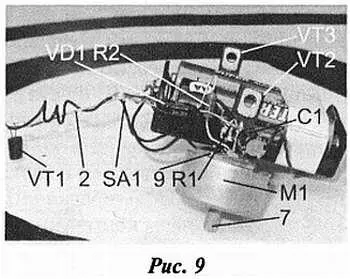
Планки имеют пары контактных площадок с отверстиями для соединения с выводами двигателей (лепестки) и скрепками. Батарейный отсек 8 на два элемента типа АА полоской изоляционной ленты 4 соединён с каркасом. К его контактным лепесткам припаяны: стойка 2 для монтажа фототранзистора, крючок 1 — контактный элемент выключателя SA1. Выключатель самодельный — его образует пара крючков и замыкатель (неодимовый магнит на рисунках не показан). Корпус фототранзистора закрыт отрезком 3 изоляции шнура компьютерной мыши. Он предохраняет датчик от засветки ярким дневным солнечным светом. Пара подобных отрезков 7 выполняет функцию покрышек колёс «бота». Монтаж остальных элементов схемы — навесной, на планках. Между собой удалённые элементы соединены тонкими проводами.
Схемный вариант иного поведения-движения робота дан на рис. 10.
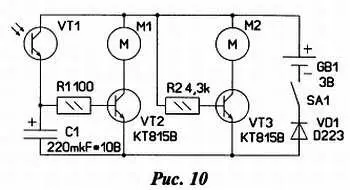
Транзистор VT3 постоянно открыт, благодаря соединению R2 с «плюсом» питания, и мотор М2 разворачивает робота при его заходе на чёрное поле. Действительно, в этот момент транзистор VT2 закрыт, и мотор M1 не работает.
Поведение робота меняется, он оказывается заключённым внутри границ белого поля и может двигаться только в них. Робот — узник, или отшельник.
О настройке изделия. Робота удобно эксплуатировать на полигонах с резкими цветовыми переходами, с плавными линиями границ. Например, как представлено на рисунках 11 и 12.
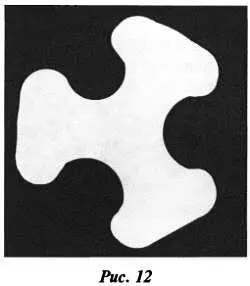
Полигон изготовлен из многослойной фанеры в форме квадрата и имеет размер стороны 70-100 см. Разметку можно наносить на обеих сторонах листа, получая, таким образом, два маршрута. Робот их выполняет при освещении полигона дневным светом или подсветки лампой накаливания мощностью около 75-100 Вт с высоты 50–80 см. В последнем случае защитный отрезок изоляции нужно с датчика снять.
Следует отметить варианты регулировки светопотока на датчик. Их два: изменение высоты фототранзистора от поверхности в пределах 2-10 мм, подбор длины отрезка изоляции от 5 мм до 10 мм.
Вместо транзисторов КТ815В подойдут транзисторы КТ815А, КТ815Б. Фототранзистор извлечён из компьютера РОБОТРОН, можно извлечь из привода автомобильного проигрывателя компакт дисков. Там же, в приводе, можно добыть магнит на выключатель SA1. Моторы проще найти в старом DVD приводе от компьютера. Напряжение их питания 5,9 В, но они уверенно работают и от 2 В.
Елка-палка 2
Эта забавная и в техническом плане, и для новогодних развлечений игрушка-сувенир (рис. 13) подробно описана на страницах вышеупомянутой книги (страница 66). В данном пункте хочу рассказать о варианте её модернизации.
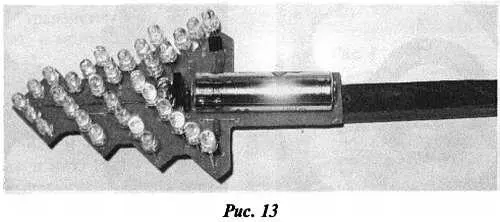
Схема преобразованного варианта дана на рис. 14.
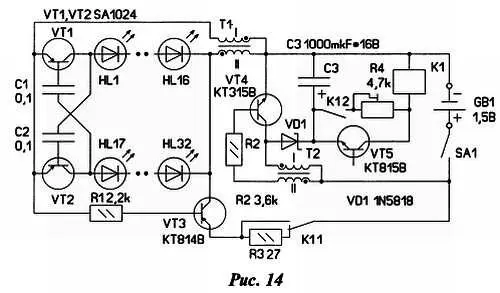
К исходной схеме (элементы VT1-VT3, HL1-HL32, T1, R1, С1,С2) добавлен дополнительный узел управления включением гирлянд светодиодов.
Контактная группа К1.1 электромагнитного реле непосредственно выполняет эту функцию. Свободно замкнутая пара ограничивает ток питания исходной схемы сопротивлением резистора R3. Напомню, частота переключений гирлянд зависит от тока питания схемы. В итоге они переключаются с частотой порядка 1 Гц. При переключении группы (замыкание выводов резистора R3 накоротко) ток питания увеличивается, и гирлянды переключаются гораздо быстрее. Таким образом периодическое переключение контактной группы добавляет дополнительный эффект в работе устройства.
Читать дальшеИнтервал:
Закладка: