Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника

- Название:Простые роботы своими руками или несерьёзная электроника
- Автор:
- Жанр:
- Издательство:СОЛОН-Пресс
- Год:2016
- Город:Москва
- ISBN:978-5-91359-185-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника краткое содержание
Книга состоит из описаний простых конструкций, содержащих электронные компоненты. Тематика изделий — электронные игрушки и сувениры.
Содержание книги является логическим продолжением содержания двух первых книг — «Роботы своими руками. Игрушечная электроника» и «Игрушечная электроника NEXT», опубликованных в издательстве СОЛОН-ПРЕСС.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий.
Простые роботы своими руками или несерьёзная электроника - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В муляж-куклу с тонкими пластмассовыми стенками помещают предметы, по характеру которых, после исследования «металлоискателем» делают вывод о состоянии «пациента».
Шарманка
Схема шарманки показана на рис. 23. В ней источником электроэнергии является шаговый двигатель от дисковода гибких дисков 5,25 дюйма. Питание устройства производится от двух статорных обмоток, имеющих общую точку. На диоде VD1 и сглаживающем конденсаторе С2 собран один однополупериодный выпрямитель, а на диоде VD2 и конденсаторе С1 — второй. Питание микросхемы DD1 осуществляется от первого выпрямителя при этом резистор R2 и светодиод HL1 образуют параметрический стабилизатор напряжения, а светодиод HL1 одновременно выполняет функцию индикатора наличия напряжения питания.
На транзисторах VT1, VT2 собран усилительный каскад, который питается от второго выпрямителя и нагрузкой которого является динамическая головка ВА1. Такое построение приводит к существенному повышению громкости звучания мелодий и позволяет использовать низкоомную динамическую головку мощностью от 0,25 до 0,5 Вт. Кнопка SB1 служит для смены мелодии (всего их 8) записанных при изготовлении в микросхему DD1.
При вращении ротора шагового двигателя начинает светить светодиод и звучать мелодия. Оптимальная частота вращения — 2–3 оборота в секунду. При меньшей частоте громкость сигнала может уменьшиться, а при большей — практически не возрастает.
Большинство деталей монтируют на печатной плате из односторонне фольгированного стеклотекстолита, размерами 40 мм на 40 мм (рис. 24).
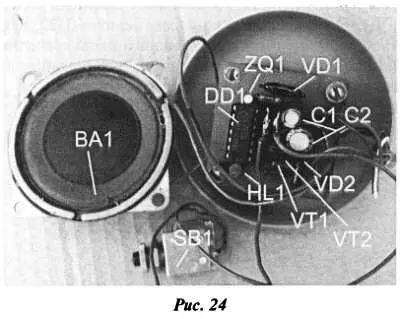
Ее крепят к двигателю, для чего вывинчивают из его статора 2 винта (по диагонали) и заменяют более длинными. Их вставляют в отверстия платы, надевают втулки и ввинчивают обратно в статор (рис. 24). Выводы обмоток припаивают: к плате предварительно «прозвонив» их омметром. Общий вывод (в авторском варианте провод коричневого цвета) соединяют с минусовым выводом конденсатора С2 а два остальных — с анодами диодов VD1,VD2. Кнопку SB1 и светодиод HL1 монтируют на плате или лицевой панели в зависимости от конструкции корпуса. В его роли можно использовать, например пластиковую банку от геля. Ручку делают из винта М3 длиной 40–50 мм.
После крепления двигателя в корпусе винт ввинчиваю в боковую резьбу головки ротора и затем с помощью двух пассатижей изгибают буквой «Г»(рис. 25).
В устройстве можно применить конденсаторы К50-35 или аналогичные импортные, резисторы MЛT, С2 -23. Транзистор КТ315В можно заменить на любой серий КТ315, K.T3I02, а КТ814В — на транзисторы серий КТ814, КТ816 с любым буквенным индексом. Диоды VD1, VD2 — маломощные например серий КД522, КД521. Светодиод — любой малогабаритный красного цвета свечения, например АЛ307БМ КИПД24А-К. Правильно смонтированное из исправных деталей устройство в налаживании не нуждается.
Глава 3
ПРАКТИЧЕСКОЕ ЭКСПЕРИМЕНТИРОВАНИЕ
В этой скромной главе на двух примерах-конструкциях описаны различные вариации применения простых схем при решении различных практических задач «игрушечного конструирования».
Тренировочный робот
Описание назначения конструкции
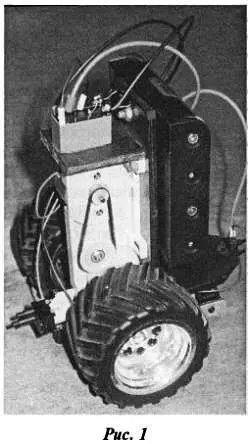
Конструкция (рис. 1) предназначена для отработки первичных навыков начинающего роботостроителя, и никаких иных функций, кроме обучающих, в себе не несёт. Движение робота линейное, обеспечиваемое одним единственным двигателем. Датчики (их два) — это переключатели — концевики. Один работает на замыкание, другой датчик — на размыкание. «Мозг робота» реализован на электромагнитном реле, резисторе и конденсаторе. Основная идея конструкции — получение различных версий принципиальных схем робота и их интерпретация в вариантах «поведения» робота.
Описание ходовой части робота и элементов конструкции
Шасси игрушки реализовано по «вертикальной схеме». Его конструкция имеет два ведущих колеса 4 (рис. 2), ведомое — опорное 3 (условно будем его считать задним колесом) и опорный зуб 11. Он нужен для предотвращения опрокидывания робота при резкой смене направления движения.
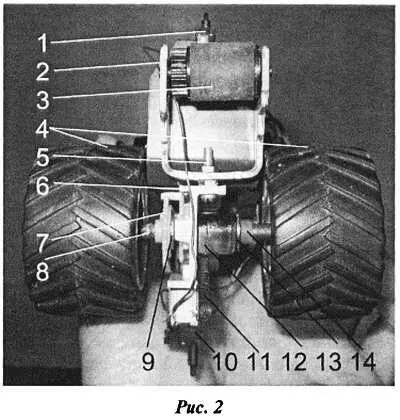
Над задним колесом, выдаваясь вперёд, расположен датчик 1 . При столкновении с плоскостью преграды его контакты размыкаются. Впереди находится датчик 10 , его контакты при взаимодействии с помехой работают на замыкание.
Ведомое колесо 3 закреплено к основанию 6 посредством винта М3 (элемент 5 ) и металлической П-образной скобы 2 . Вращающийся вал 8 содержит жёстко закреплённые колёса 4 , шестерню 7 с приклеенной для жесткости шайбу 9 и «кембрик» 14 (отрезок резиновой трубочки). Отрезок предотвращает продольное смещение вала. Шайба 13 уменьшает трение при вращении вала и его взаимодействии с опорной втулкой 12 .
Батарейный отсек 15 рассчитан на четыре элемента питания типа АА. На его боковой поверхности приклеена контактная плата 16 (4 контактные дорожки). На ней находится выключатель питания батареи 17 . Отсек прикручен к отрезку Г-образного профиля 18 винтом М3. Сам профиль приклеен к основанию 6 по всей длине боковой линии. Основанием 6 служит фрагмент пластмассового шасси DVD привода от компьютера, содержащий двигатель 19 и понижающий редуктор. Сверху к профилю приклеена пластина 20 , на которую крепится миниатюрное электромагнитное реле 21 с парой переключающих контактов.
Выводы реле 21 и дорожки платы 16 образуют монтажное поле для других элементов принципиальной схемы робота. Межэлементное соединение осуществляется гибкими проводами 22 . С их помощью удобнее трансформировать варианты схем устройства.
Колёса 4 изъяты из детской радиоуправляемой игрушки — машины внедорожника. Посадочные гнёзда в них рассверлены насквозь сверлом диаметром 5 мм. Вал 8 — стальной стержень диаметром 5 мм и длиной около 7 см. Шайбы 9, 13 стальные под винт М5. Втулка 12 это отрезок крепёжной стойки корпуса телевизора. В нём рассверливается имеющееся сквозное отверстие до диаметра 5,5 мм. Втулка приклеивается к основанию «секундным клеем». Концевики — кнопки 1, 10 извлечены также из привода компьютера и приклеены к основанию 6 (элемент 10 ) и профилю 18 (элемент 1 ) тоже с помощью клея. Профиль вырезается из корпуса от телевизора (используется его угол). Высота отреза около 9 см, ширина 3 см. Опорный зуб 11 выпиливается также из листовой пластмассы корпуса. Зуб сажают на клей к основанию 6 . Реле (элемент 21 ) приклеивают к пластине 20 (пластина изготовлена из корпуса телевизора) вязким, «резиновым клеем». На вал двигателя 19 насажен пластмассовый шкив. Первое понижение частоты вращения в редукторе происходит за счёт ременной передачи, далее снижение осуществляется шестерёнками.
Читать дальшеИнтервал:
Закладка: