Сергей Макаренко - Противодействие беспилотным летательным аппаратам

- Название:Противодействие беспилотным летательным аппаратам
- Автор:
- Жанр:
- Издательство:Издательство «Наукоемкие технологии» OOO «Корпорация «Интел Групп»
- Год:2020
- Город:Санкт-Петербург
- ISBN:978-5-6044793-6-0
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Сергей Макаренко - Противодействие беспилотным летательным аппаратам краткое содержание
Материалы работы предназначены для научных сотрудников, соискателей ученых степеней, военных и технических специалистов, занимающихся вопросами противодействия БПЛА.
Отдельные результаты, представленные в данной монографии, получены в рамках госбюджетной темы НИР СПИИРАН № 0073-2019-0004.
Противодействие беспилотным летательным аппаратам - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
4.3.3. Особенности радиоэлектронного подавления интегрированной навигационной системы БПЛА, основанной на комплексировании данных микромеханических инерциальных систем и сигналов СРНС
Выше были рассмотрены навигационные системы самых простых малых БПЛА, основанные на приеме и обработке сигналов СРНС. На более сложных БПЛА устанавливаются элементы автономной навигационной системы — акселерометры, гироскопы, барометры, лазерные высотомеры и т. д. Общепринятой нормой точности авиационных инерциальных ИНС «средней точности» является ошибка счисления пути в 1,85 км за 1 ч полета. Такая точность достигается авиационными ИНС на основе лазерных или волоконно-оптических гироскопов. Однако масса таких ИНС составляет от 8 кг, что делает проблематичным их использование на малых и даже на средних БПЛА.
В результате на малых БПЛА устанавливается более простая ИНС, оснащённая микромеханическими датчиками движения — акселерометрами и гироскопами. Такая ИНС, без ее коррекции по сигналам СРНС, не в состоянии осуществлять автономное счисление пройденного пути ввиду высоких скоростей дрейфа гироскопических датчиков. Накапливаемая ошибка микромеханических ИНС, в условиях отсутствия корректирующих сигналов СРНС, за 1 мин составляет до 3 м по горизонтали и 2 м по вертикали. Таким образом, эти ИНС способны без сигналов СРНС поддерживать приемлемую точность полета на уровне 100–150 м в течении не более 10 мин. При этом, как правило, имеется ввиду поддержание режима прямолинейного полета без ускорений и маневров. Примерами таких образцов микромеханических ИНС могут являться устройства Geo-iNAV (масса порядка 3 кг). Таким образом на современном этапе развития навигационных систем малых БПЛА для счисления пути с приемлемой точностью требуется использование сигналов СРНС [294]. Дополнительными способами повышения автономности и точности навигационных систем БПЛА является установка барометра, радио- или лазерного высотомера. Приблизительный диапазон измерений простого барометрического высотомера для малых БПЛА до 9 км, точность 0,1 м. Диапазон измерений радиовысотомера до 700 м, точность по высоте 2–5%, точность по углу 0,25° [295]. Диапазон измерений лазерного высотомера 0,1-120 м (статические поверхности) и 2-40 м (движущиеся поверхности), разрешение 1 см, точность 0,1 м (объект с 70 % светоотражением при 20 °C) [296]. Это оборудование позволяет повысить точность определения координат за счет использования дополнительных каналов поступления навигационных данных, а также формировать профили автономного полета БПЛА по электронным картам местности содержащим барометрические данные или высотные профили подстилающей поверхности [297].
Особенности функционирования интегрированных навигационных систем БПЛА рассмотрены в работах [298].
В работе [299]показано, что стандартным режимом интегрированной навигационной системы БПЛА, является следующая иерархия обработки навигационных данных (по мере снижения значимости и приоритета источника навигационных данных): «ИНС — СРНС — ОЭС — барометр — радиовысотомер». В случае затрудненного приема сигналов СРНС навигационная система БПЛА переходит в режим «ИНС — ОЭС — барометр — радиовысотомер», причем в этом случае ОЭС может быть использовано как для автономного контроля полета по визуальным ориентирам, так и для организации прямого дистанционного управления оператором по визуальным данным от ОЭС. При отсутствии ОЭС на БПЛА навигационная система переходит в режим «ИНС — барометр — радиовысотомер», для полета по барометрической и электронной карте местности. При этом, как отмечается в работах [300], в настоящее время наблюдается уход от использования ОЭС для прямого управления БПЛА оператором, в направлении автономного использования ОЭС, а также других радиотехнических средств БПЛА, в режиме SLAM — режим автоматического одновременного построения карты местности в неизвестном пространстве и одновременного контроля текущего местоположения БПЛА, а также счисления пройденного пути.
В работе [301]исследуется функционирование интегрированных навигационных систем в режимах «ИНС — СРНС» и «ИНС — СРНС — АЗН-В», где наземные опорные станции (НОС) АЗН-В формируют своеобразную локальную РСБН. Показано, что в режиме «ИНС — СРНС» при полном созвездии навигационных спутников (4-е и более) обеспечивается погрешность местоопределения БПЛА на уровне 6–8 м. В случае, когда количество видимых навигационных спутников снижается до 2–3, погрешность квазилинейно растет (рис. 4.5) при этом ИНС способна без сигналов СРНС поддерживать приемлемую точность полета на уровне 30 м в течении не более 2–4 мин, на уровне 60 м — в течении 4–6 мин [302].
В режиме «ИНС — СРНС — АЗН-В» интегрированная инерциальная система корректирует показания ИНС как по сигналам СРНС, так и по сигналам наземных опорных станций системы АЗН-В с точно известными координатами. Использование подобного режима позволяет значительно снизить погрешность местоопределения БПЛА. Так, при видимости 2 навигационных спутников и 2 станций АЗН-В погрешность местоопределения снижается до 18–20 м (рис. 4.6). Фактически станции АЗН-В создают избыточность псевдодальномерных наблюдений и компенсируют отсутствие видимости полного созвездия спутников СРНС. В целом интегральные навигационные системы БПЛА в режиме «ИНС — СРНС — АЗН-В» обеспечивают точность навигации 16–18 м [303]. Такой подход к повышению точности интегрированных навигационных систем БПЛА за счет внешних источников псевдодальномерных сигналов схож с предложениями по созданию локальных РСБН, представленных в работах [304].
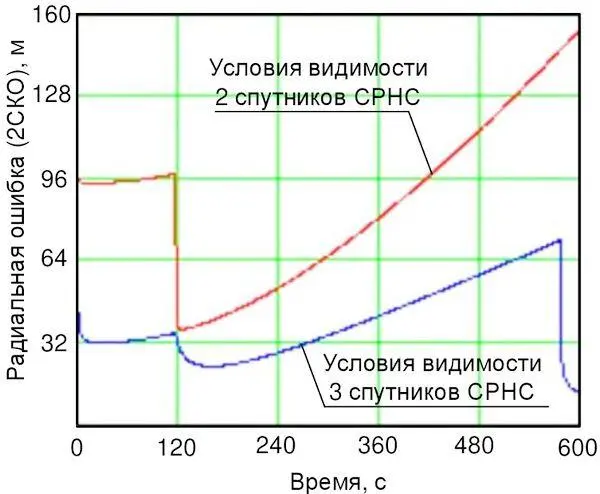
Рис. 4.5. Ошибка оценки координат в режиме «ИНС — СРНС» при видимости 2, 3 навигационных спутников СРНС [305]
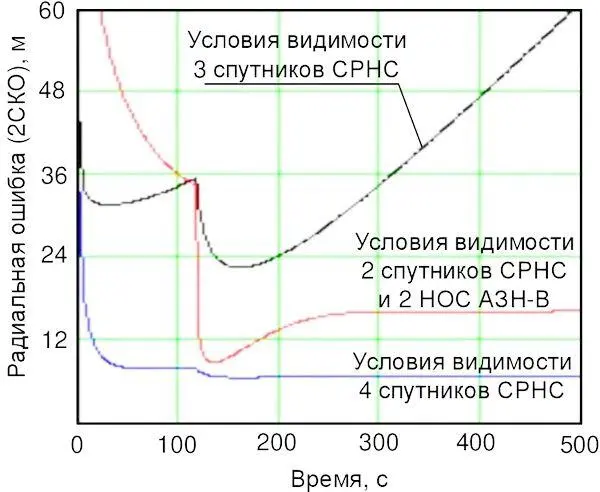
Рис. 4.6. Ошибка оценки координат в режиме «ИНС — СРНС — АЗН-В» при видимости 2, 3, 4 навигационных спутников СРНС и 2 НОС АЗН-В [306]
В работе [307]исследуется функционирование интегрированной навигационной системы «ИНС — СРНС» в зависимости от ОСШ сигналов СРНС на приемнике АП. Результаты этого исследования приведены на рис. 4.7.
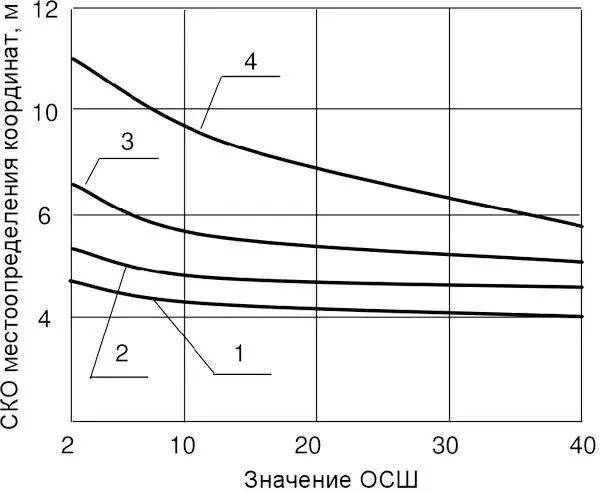
а.
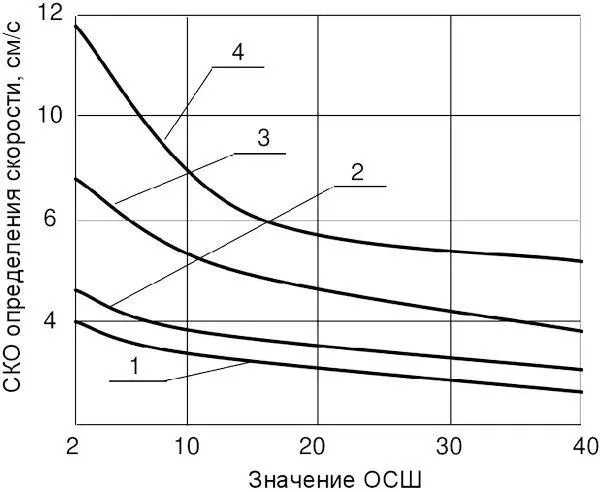
б.
Рис. 4.7. Точность интегрированной навигационной системы «ИНС — СРНС» по параметрам СКО местоопределения координат (а) и скорости (б) в зависимости от ОСШ сигналов СРНС на приемнике АП в различных режимах [308]
Читать дальшеИнтервал:
Закладка: