Журнал «Юный техник» - Юный техник, 2013 № 09

- Название:Юный техник, 2013 № 09
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2013
- ISBN:0131-1417
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Журнал «Юный техник» - Юный техник, 2013 № 09 краткое содержание
Юный техник, 2013 № 09 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Поэтому во многих случаях в робототехнике используются электромоторы не переменного, а более удобные в управлении коллекторные двигатели постоянного тока. Они легко управляются — подай на них постоянный ток от батареи или аккумулятора, и они начинают крутиться. Причем скорость вращения напрямую зависит от величины напряжения. Поменять направление вращения тоже просто, надо лишь поменять полярность подаваемого напряжения.
Правда, есть у коллекторных двигателей и свои недостатки. Ток передается с неподвижного статора на вращающийся ротор с помощью щеток коллектора. А они имеют свойство довольно быстро истираться от трения. Да и использование постоянного тока не всегда удобно — ныне в электротехнике чаще применяют переменный ток. А значит, нужен еще и выпрямитель.
Поэтому некоторые конструкторы предпочитают использовать в своих разработках бесколлекторные электродвигатели переменного тока. Они экономичны и долговечны. Но вот с управляемостью скорости вращения у них проблемы: для этого нужно менять частоту переменного тока, что опять-таки требует специального оборудования.
Еще одна разновидность двигателей, которая часто используется в робототехнике, — шаговые. Они умеют по команде «сделать шаг» — то есть повернуться на заранее заданный угол. Величина шага (или угла поворота) зависит от конкретной конструкции данного двигателя. Если в нее заложен шаг в 24 градуса, значит, полный оборот двигатель сделает за 15 шагов.
Такие двигатели довольно часто используются, например, в конструкциях шагоходов.
И, наконец, последняя разновидность двигателей, с которыми мы сегодня познакомимся, — это серводвигатели. Они могут не только поворачиваться на определенный угол, но и удерживать его. Такие двигатели обычно применяют для движения механических рук робота. Кроме того, с их помощью отклоняют ротор вертолета и элероны самолета, — на определенный угол поворачивают передние колеса автомобилей в радиоуправляемых моделях.
В состав сервомеханизмов, кроме двигателей, могут входить датчики-сенсоры, которые позволяют роботу ориентироваться в окружающей обстановке, а также системы телеуправления или бортовой компьютер-микроконтроллер, на месте «соображающий», согласно заложенным в него программам, что делать, какую команду подать в том или ином случае.
Исторически сложилось так, что поначалу роботами дистанционно управляли операторы с помощью средств телемеханики. Термин «телемеханика» был предложен в 1905 году французским ученым Э. Бранли. Первоначально достижения телемеханики использовали для управления по радио подвижными военными объектами — например, танкетками на поле боя. Известны случаи применения боевой техники, оснащенной устройствами управления на расстоянии, еще во время Первой мировой войны.
Практическое применение телемеханики в мирных целях началось в 20-х годах ХХ века, главным образом на железнодорожном транспорте. Дистанционное управление семафорами и стрелками было впервые осуществлено в 1927 году на железной дороге в Огайо (США). А спустя шесть лет первые телесистемы появились и в Московской энергосистеме (Мосэнерго).
Развитие телемеханики шло параллельно с развитием электроники и средств связи. Первые системы строились на релейных схемах. В 50-х годах прошлого века на смену реле пришли более компактные транзисторы. В конце 60-х годов началось использование интегральных микросхем.
В конце 80-х годов в схемотехнике систем телемеханики в схемах, построенных на жесткой логике, в качестве управляющего элемента стали использовать программируемые микроконтроллеры. Это позволило гибко адаптировать, приспосабливать аппаратуру управления под решение той или иной конкретной задачи путем изменения программы. В 1992 году был изготовлен первый в СССР комплекс телемеханики «Сириус», построенный на восьмиразрядных микропроцессорах.
Постепенно предпочтение в робототехнике стали отдавать системам автоматического, а не дистанционного управления. И вот почему. Во-первых, людям свойственно уставать, а значит, и ошибаться. Во-вторых, даже самый толковый оператор может не успеть уследить за изменяющимися событиями. Так, например, в свое время на тех же советских луноходах, отправленных на Селену
в начале 70-х годов, были установлены автоматические датчики крена. Нужны они оказались вот для чего. Радиосигнал летит с огромной быстротой — 300 000 км/с. Но все равно, даже при такой скорости путь от Земли до Луны и обратно он проделывает за 2 секунды. Казалось бы, невелик срок. Но за это время луноход может преодолеть несколько метров и. опрокинуться, если на пути попадется, скажем, кратер — яма, оставшаяся от упавшего некогда метеорита.
Чтобы такого не случилось, и на «Луноходе-1», и на «Луноходе-2» были установлены датчики-сенсоры, следившие за наклоном машины и подававшие команду «стоп» тотчас, как только возникала опасность опрокидывания. Но подробнее о сенсорах и их устройстве мы с вами поговорим в следующий раз.
Современный робот-андроид
«ШАГИ» ДВИГАТЕЛЕЙ
Шаговые электродвигатели умеют по команде микроконтроллера «сделать шаг» — то есть повернуться на заранее заданный угол.
По конструкции шаговый электродвигатель представляет собой синхронный бесщеточный электромотор с несколькими обмотками. При этом ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. А последовательная активация обмоток двигателя — подача энергии на ту или иную обмотку — позволяет произвести дискретные угловые перемещения (шаги) ротора.
Шаговые двигатели с ротором из магнитно-мягкого (ферромагнитного) материала или из магнитно-твердого (магнитного) материала позволяют получать довольно большой крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках. Моторы с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
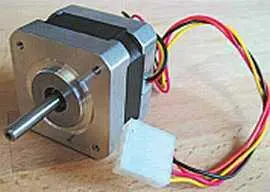
Шаговый электродвигатель NEMA 17.
Главное достоинство шаговых приводов — точность. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. Кроме того, стоят они дешевле сервоприводов, о которых пойдет речь ниже.
Впрочем, есть у шаговых двигателей и недостатки. Наиболее известная проблема — возможность «проскальзывания» ротора при превышении нагрузки на валу, неверной настройке управляющей программы или при приближении скорости вращения к резонансной. Чтобы избежать проскальзывания ротора, лучше использовать двигатели с избыточной мощностью.
Читать дальшеИнтервал:
Закладка: