Техника и вооружение 1993 03

- Название:Техника и вооружение 1993 03
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:1993
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Техника и вооружение 1993 03 краткое содержание
Техника и вооружение 1993 03 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Решением робототехнических проблем в США заняты не только специализированные научные и производственные организации, но и практически все машиностроительные и технологические учебные институты. В качестве примера достаточно привести университет Южной Калифорнии, где исследования в области робототехники ведутся почти десять лет базовыми лабораториями робототехники, моделирования мозга, машинного зрения и интеллекта, захватных устройств. Субсидируется эта работа Национальным научным фондом, НАСА, Управлением оборонных исследований (DARPA) и промышленными предприятиями США, Лабораторией реактивного движения.
Достаточно отметить, что усилиями механического и электротехнического факультетов разработаны роботы US Robotics-100, IBN-7545 и другие аналогичные модели. В университете выполняются исследования по проблемам дистанционного управления манипуляторами, телероботами с учетом влияния временного запаздывания и неидеальности канала связи; синтеза экспертных систем в помощь человеку-оператору, осуществляющему управление телероботом.
Наглядным примером стремительного развития военных роботов и робототехнических систем может служить программа работ Окриджской национальной лаборатории (США) в области робототехнических и интеллектуальных систем (РИС). Она осуществляет комплексные исследования в области робототехники, дистанционно управляемых манипуляторов, искусственного интеллекта, нейросетей, параллельных вычислений. Министерство обороны через организации а^рмии и ВМС США, лабораторию аэронавтики ВВС США, НАСА субсидирует исследования по мобильным роботам, телеуправляемым БЭМСам, дистанционно управляемым манипуляционным системам. Лаборатория разрабатывает системы координации применения разнотипных Р и PC в условиях боевых действий.
Программа РИС имеет междисциплинарную структуру: в ней используется опыт ученых и инженеров различных подразделений, лабораторий, а результаты работ передаются Министерству энергетики, Министерству обороны, НАСА и другим спонсорам и заказчикам.
Исследования по программе РИС направлены на реализацию интересов человека в агрессивных и полуструктурированных средах, где необходимо обеспечивать навигацию, манипуляцию и инспекцию в реальном времени. В число изучаемых областей входят: машинный интеллект – построение машин, способных к логическим рассуждениям и самообучению при встрече с непредвиденными ситуациями; эффективные вычисления – разработка нейросетевых компьютеров, параллельных алгоритмов (в том числе реализуемых на последовательных машинах), мультипроцессорных систем; механика, динамика и управление гибко формируемыми манипуляционными операциями и локацией роботов; системы технического зрения (СТЗ) и другие сенсоры для эффективного построения модели трехмерного мира; развитие системы телеуправления для сложных дистанционных операций с максимальными эффективностью и устойчивостью к постепенному ухудшению характеристик аппаратуры (для этого требуется разработка систем передачи информации, отражения усилий, связи и т. д.); человеко- машинное взаимодействие при «совместном» выполнений заданий; интеграция системы в целом для проверки реализуемости предлагаемых концепций и синтеза результатов независимых исследований и разработок.
Работы по программе РИС организационно ведутся по двум направлениям: роботы и дистанционно управляемые манипуляторы (с группами специалистов по обеспечению мобильности и манипуляционных операций и по разработке сенсоров и электронных блоков роботов); искусственный интеллект и развитые вычислительные системы (с группами по планированию, логическим рассуждениям, решению задач и по нейросетям и объединению сенсорных данных). Еще одна область деятельности связана с общей интеграцией результатов программы и координацией проектов, включая распределение ресурсов, обеспечение качества и сроков выполнения работ.
В Центре перспективных исследований технических систем (CESAR) создан специальный интерфейс, позволяющий осуществлять связь человеку-оператору с боевыми роботами. Здесь имеется специальный стенд, предназначенный для испытаний Р и PC, а также для исследований применения роботов-солдат. Технические характеристики стенда приводятся ниже.
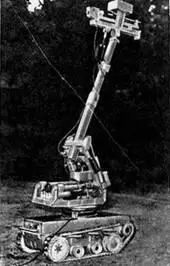
Австрийская дистанционно управляемая машина «Echidna».
| Общего назначения | Боевых | Боевого обеспечения | Инженерного обеспечения | Тылового и технич. обеспечения |
| Идентификация и контроль состояния среды | Поражение целей | Осуществление разведки (радиационной, химической, биологической, тактической) | Инженерная разведка местности и водных преград | Тактико-техническое обеспечение |
| Реализация транспортных операции | Патрулирование в районах спецобъектов | Наблюдение, обнаружение и целеуказание | Постановка минных заграждений и проделывание проходов в минных полях | Эвакуация и ремонт |
| Реализация манипуляционных операций | Реализация охранно-сторожевых функций | Разведка средств радиоэлектронной борьбы | Разграждение маршрутов, отрывка траншей и котлованов | Транспортировка грузов и боеприпасов |
| Совершенствование систем обслуживания различных узлов и агрегатов | Обнаружение проводных линий связи и управления | Обеспечение переправ | ||
| Постановка дымовых завес . |
Он имеет мобильную платформу массой 1 134 кг с дизельным двигателем, обеспечивающим скорость движения 12-16 км/ч по пересеченной местности. Связь с пультом управления оператора осуществляется по автоматически выпускаемому и втягиваемому кабелю. Устанавливаемый на платформе манипулятор с тремя степенями подвижности имеет грузоподъемность 136 кг (при собственной массе 90 кг), радиус рабочей зоны 2,4 м.
повторяемость позицирования + 0,3 мм, скорость движения 0,6 м/с по вертикали и 1,25 м/с по горизонтали. Предполагается также разработка кисти грузоподъемностью 100 кг (при собственной массе 34 кг).
Вычислительные средства, используемые в Центре, включают в себя: аналогичный ЭВМ компьютер Gray-1 , построенный по структуре двухмерного клеточного автомата с 65 536 узлами; LISP- и Lambda-машины; графическую рабочую станцию с IRIS-3; гиперкубический параллельный компьютер NCUBE с 63 узлами (при полной нагрузке – 1 024 процессора – его производительность составляет около 500 млн. операций с плавающей запятой, а объем не превышает половины кубометра, включая блоки питания и систему охлаждения). Центр обладает также развитым программным обеспечением, в частности программной поддержкой САПР.
Читать дальшеИнтервал:
Закладка: