Техника и вооружение 1993 03

- Название:Техника и вооружение 1993 03
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:1993
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Техника и вооружение 1993 03 краткое содержание
Техника и вооружение 1993 03 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

Механический человек-робот «Эрик» инженера Ричардса (1928 г., Великобритания).
Приведенные определения всецело относятся и к военным роботам, так как согласно современной теории систем гражданские промышленные роботы и военные роботы синтезируются по единой методологии.
По мнению зарубежных специалистов, производство роботов, робототехнических и дистанционно управляемых средств, а также автоматических систем базируется на основных разделах мехатроники. Военную робототехнику стимулирует развитие измерительной и информационной техники, электротехники, микропроцессоров, систем автоматического управления, теории информации, механики, транспортной техники, лазерной техники и электронной оптики, вычислительной техники и программирования, материаловедения.
Считают, что для осуществления роботизации сухопутных войск необходимо в первую очередь решить такие технические и технологические проблемы, как разработка специальных датчиков и систем очувствления, вычислительной техники и программирования, сервоприводов, механических узлов роботов, систем обработки информации, распознавания образцов и принятия решений, устройств сопряжения (оператор – средства отображения информации – машина); совершенствование технологической, метрологической и испытательной баз (подразделений).
Современные достижения в области науки и техники способствуют развитию военной робототехники, применение коммерческих роботов в промышленности подтверждает физическую реализуемость многих военных образцов, развитие систем очувствления и микропроцессорной техники стимулирует создание систем искусственного интеллекта.
Основные сферы ожидаемого применения военных роботов и. роботизированных средств общего назначения, боевых, боевого обеспечения, инженерного обеспечения, технического и тылового обеспечения (по обобщенным данным зарубежной печати) представлены в таблице.
Проблемными вопросами роботизации считают новую постановку тактических задач, формулирование требований к гипотетическим роботам, создание научного, технического и технологического обеспечения.
По данным, которые приводятся в американской печати, армия и промышленность США осуществляют практическую реализацию робототехнических систем по модульному принципу: выбирается многоцелевая дистанционно управляемая самоходная установка, на базе которой синтезируются различные системы вооружения.
Говоря о становлении и развитии военной робототехники в зарубежных армиях, уместно привести исследования американской Президентской комиссии по промышленной конкурентоспособности (President's Comission on Industrial Competitivenes). Информативность результатов исследований по изучению темпов и перспектив использования промышленных роботов в США и Японии очень велика и убедительна. Ниже приводится только один из фрагментов сопоставительного анализа. Так, в США потребовалось на роботизацию автомобилестроения 15 лет, электротехники – 17 лет, бытовой техники – 19 лет, металлургии – 20 лет, сталелитейной промышленности – 3 года, станкостроения – 18 лет (в среднем – 12 лет). В Японии по сравнению с США этот процесс начался на 6 лет позже, то есть в 1967 г., роботизация автомобилестроения заняла 6 лет, электротехники – 2 года, металлургии – 9 лет, машиностроения – 15 лет (в среднем – 8 лет). Эти данные убедительно свидетельствуют о том, что даже при практически безупречной упорядоченности любого промышленного производства, при его абсолютной стационарности требуется не менее 15 лет на решение проблем роботизации.
Проецируя эти оценки на военную робототехнику, следует помнить, что ее освоение и производство практически осуществляются без партнерства и взаимного обогащения в области технических решений. При этом степень корреляции между промышленной и военной роботизацией не вызывает у специалистов сомнений. Поэтому достаточно информативны данные по промышленной робототехнике. Так, если в США в 1982 г. было изготовлено 6 300 роботов, то в 1990 г. их число составило 100000 штук, а, соответственно, в Японии – 55700 штук. Национальный институт стандартов и технологии США (National Institute of Standarts) прогнозирует, что за десять лет только в США (1984-1994 гг.) объем выпуска промышленных систем технического зрения (СТЗ) возрастет с 60 млн. до 1,2 млрд. долларов. Следует особо подчеркнуть, что система технического зрения достаточно однозначно определяет степень машинного (искусственного) интеллекта в роботостроении.
В настоящее время исследованиями в области робототехники заняты ведущие институты и университеты США, ФРГ, Японии, Великобритании, Италии. Направления их исследований не ограничиваются рамками машиностроительного профиля. Так, в Технологическом институте штата Джорджия (США) исследовались способы навигации мобильных роботов, использующих стереотипные схемы движения. В основе этого подхода, работоспособность которого была показана' путем моделирования и в экспериментах с реальным мобильным роботом, лежат данные нейрофизиологии. Скорость робота и рулевое управление определяются ро методу потенциального поля. Распределенная архитектура системы управления автономным мобильным роботом обеспечивает работу ультразвукового и зрительного сенсоров, «лоцмана» (блока обхода препятствий) и модулей, реализующих стереотипные схемы движений. Краткосрочная память хранит информацию о модели мира, построенной блоком картографирования местности. Перепланирование действий осуществляется сравнительно редко – при обнаружении неподвижных препятствий. Этот подход предполагается распространить на случай трехмерного пространства для управления аэрокосмическими и подводными мобильными роботами.
Корпорация NEC (США) разработала систему наведения транспортных робокаров, испопьзующих высокочувствительный магнитный сенсор и маршрутопроводы из мягкого ферромагнитного материала или ферритовой краски. Такие маршрутопроводы очень дешевы, надежны, устойчивы к загрязнениям, могут быть легко проложены как внутри, так и вне помещений и позволяют гибко менять программу движений мобильного аппарата, управляемого от микропроцессора.
Устройство механизма музыкантши.
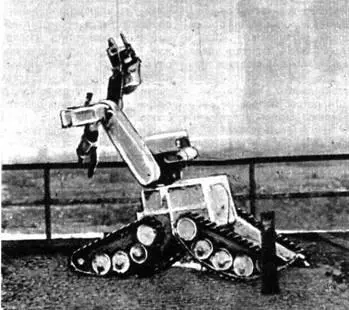
Телеуправляемая машина-робот MF3 (ФРГ).
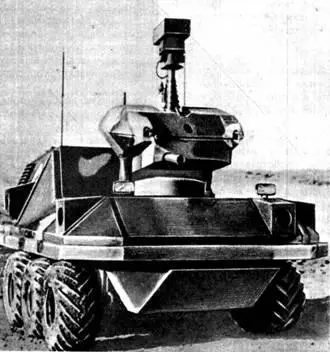
Мобильная дистанционно управляемая машина-робот «Prowler» (США).
Читать дальшеИнтервал:
Закладка: