Малая скоростная автоматизированная подводная лодка-истребитель пр. 705(705К)

- Название:Малая скоростная автоматизированная подводная лодка-истребитель пр. 705(705К)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2002
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Малая скоростная автоматизированная подводная лодка-истребитель пр. 705(705К) краткое содержание
Малая скоростная автоматизированная подводная лодка-истребитель пр. 705(705К) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В сентябре того же года мне поручили проработки централизованного автоматизированного управления общекорабельными системами (ОКС) и отдельными механизмами АПЛ пр.671. Для выполнения этих проработок сформировали группу конструкторов, в которую первоначально вошли И.М.Иванова, В.В.Кубилюнас, В.А.Макеев, Я.В.Миронова, Е.Д.Савельев и Н.Ф.Цветкова.
Группе специалистов предстояло впервые создать не имеющую аналогов систему централизованного управления большим количеством механизмов, устройств и арматуры (около 220 наименований арматуры, более 500 источников), рассредоточенных по всему кораблю. До этого практически все общекорабельные системы на ПЛ управлялись вручную по месту.
В 1959-1960 гг. эта группа проработала функциональные схемы управления общекорабельными системами, разработала алгоритмы управления и определила номенклатуру необходимых источников информации и дистанционно управляемого оборудования. Также была предложена компоновка лицевых панелей пульта управления. В проработке давались предложения по использованию элементной базы, были рассмотрены отдельные схемные узлы на полупроводниковых приборах и магнитных усилителях. Были даны предложения по диапазонам измерения параметров контролируемых сред и способам установки датчиков и сигнализаторов на корабельном оборудовании.
Сделанные первые шаги в автоматизации потребовали от исполнителей-электриков детального изучения общекорабельных систем и режимов их работы.
В разработку концепции автоматизации ОКС и разработку алгоритмов управления значительный вклад внесли разработчики этих систем А.П.Алексеев, Н.В.Анучин, В.Л.Апполонова, Г.Д.Ивашкин, В .Л. Кожух, В.П.Микитас, Ю.Д.Перепелкин, Н.Е.Пирогов, В.В.Скрипник, Л.Н.Трофимов и др. Они же в дальнейшем обеспечили разработку новых дистанционно управляемых механизмов, устройств и арматуры.
Необходимо отметить большую роль в создании первых образцов дистанционно управляемого оборудования и обеспечении внедрения систем централизованного управления главного конструктора пр.671 Г.Н.Чернышева и его заместителя А.И.Колосова.
В качестве исходных данных в проработке использовались требования к автоматизации ОКС, разработанные ЦНИИВК ВМФ. Первым наблюдающим за работами по автоматизации ОКС от ЦНИИВК стал А.М.Хватовкер.
Проработка выполнялась в исключительно сжатые сроки с энтузиазмом, присущим послевоенным годам: не считаясь с личным временем, мы изо дня в день засиживались на работе до 9-10 часов вечера.
В июне 1960 г. на базе группы XVIII отдела, выполнившей первые проработки, был сформирован сектор автоматизации общекорабельных систем. Вскоре сектор пополнился специалистами, которые заняли ведущее положение в специализации. Это С.И.Андриевский, Н.Н.Зубин, Т.А.Клемент, С.Г.Лебедев, В.К.Осипов, А.И.Сбитнев и др.
Объяснительная записка по проработке, технические требования к системе управления ОКС, альбом схем с алгоритмами управления в апреле 1960 г. передали разработчикам систем управления. Первоначально работа велась на конкурсной основе 5-м отделением ЦНИИ-45, где работу возглавлял начальник отдела В.Г.Павлов, и вновь организованным ОКБ-781 (с 1961 г. – ОКБ морской автоматики "Секстан"), где работой руководили главный инженер Ю.С.Путято и начальник отдела Л.М.Фишман, а ведущим инженером заказа (ВИЗ) являлся В.В.Киселев.
ЦНИИ-45 проектировал систему в телемеханическом варианте с временным уплотнением каналов связи на феррит-диодных элементах, а ОКБ МА "Секстан" – систему с радиальной передачей команд управления и фазовым уплотнением каналов сигнализации на магнито-вентильных логических элементах с выходными магнитными усилителями. Сравнительная простота системы, высокие надежностные характеристики элементной базы определили выбор для реализации в пр.671 варианта ОКБ МА "Секстан".
Системе был присвоен шифр "Вольфрам". С этим наименованием она просуществовала длительное время, в том числе в виде модификаций для лодок второго поколения (пр.671РТ, 671РТМ и др.).
Характерно, что на ПЛ, проектируемых СКБ-143, с самого начала все общекорабельные системы, включая кондиционирование и регенерацию воздуха помещений, управлялись с единого пульта одним оператором. На лодках, проектируемых в те же годы другими бюро, для управления кондиционированием и регенерацией воздуха в помещениях устанавливались отдельные системы дистанционного управления (СДУ) со своими пультами управления (например, на АПЛ пр.661 – система "Сартдуко").
При разработке системы централизованного автоматизированного управления ОКС "Вольфрам" возникало много вопросов, связанных с выбором и разработкой управляемого оборудования, особенно самого многочисленного – дистанционно управляемой арматуры. Для ин- формации о положении механизмов и арматуры, обеспечения блокировок и формирования сигналов управления по заданным алгоритмам ОКБ МА "Секстан" разработало сигнализаторы положения механизмов (СПМ) с бесконтактными датчиками (ДБП).
Кроме сигнализаторов положения механизмов ОКБ МА "Секстан" были разработаны бесконтактные сигнализаторы давления, перепада давления, работы насосов, вентиляторов.
Большой вклад в разработку и освоение серийного производства сигнализаторов от ОКБ МА "Секстан" внесли В.Н.Соловьев, К.И.Ришес. От СКБ-143 активное участие в этой работе принимали А.В.Гамзов и В.А.Ивлев.
Несмотря на достаточно высокую надежность бесконтактных датчиков потребовалось много усилий для доведения технологии регулировки системы "арматура-датчик" до той, которая обеспечила бы устойчивую выдачу сигнала при длительной эксплуатации.
Система "Вольфрам" позволяет осуществлять одному оператору централизованное управление противоаварийными системами, системами управления плавучестью, обиходными системами, специальными устройствами и системами обеспечения обитаемости.
С центрального пульта осуществляется управление 200-250 устройствами и корабельными механизмами, а также контроль их технического состояния. Система осуществляет контроль исправного состояния цепей, включая электромагниты исполнительных органов, и периодический контроль исправного состояния электроэлементов и каналов управления и сигнализации. Выполнена на унифицированных схемно-конструкторских модулях.
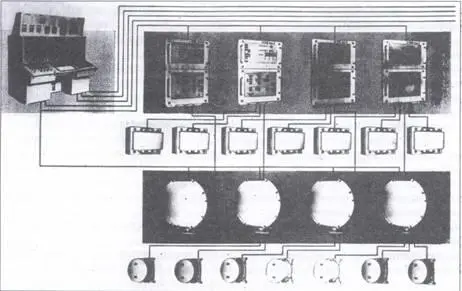
Система включает в себя: центральный пульт (1), герметичные исполнительные пульты (2), пульты местной сигнализации (3), соединительные ящики (4). Общий вес приборов системы – 3400 кг.
Элементная база: безконтактные магнитно-диодные элементы, магнитные усилители, люминофорные мнемосхемы.
Читать дальшеИнтервал:
Закладка:


![Андре-Марсель Адамек - [Самая большая подводная лодка в мире]](/books/582915/andre.webp)