Техника и вооружение 2010 02

- Название:Техника и вооружение 2010 02
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2010
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Техника и вооружение 2010 02 краткое содержание
Техника и вооружение 2010 02 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

Танк T-44 с системой автоматизированного управления движением на испытаниях. НИИБТ полигон 1949 г.

Танк-мишень «Объект 601».
Работы по автоматизации управления движением танков начались еще в конце 1940-х гг. В период с 19 февраля по 10 апреля 1949 г. на НИИБТ полигоне прошли испытания танка Т-44 с системой автоматизированного управления движением. Система была разработана и изготовлена сотрудниками этого же полигона. Она включала аппаратуру и оборудование автоматического переключения передач, дистанционного сервоуправления поворотом и тормозами, дистанционного управления подачей топлива командиром танка.
Автоматизированное управление движением танка осуществлялось с помощью двух одинаковых пультов, расположенных у механика-водителя и командира танка. На пульте имелось три кнопки «Пуск. Стоп», «Больше скорость», «Меньше скорость» и рычаг управления поворотом и торможением танка. Аппаратура автоматизированного управления состояла из электрического и пневматического оборудования. В состав электрооборудования входили два пульта управления, центральный распределитель, ножной пульт управления подачей топлива (реостат), расположенный у командира танка, и тахометр.
Пневмооборудование состояло из компрессора, четырех воздушных баллонов, клапанного устройства, пневмоцилиндров управления главным фрикционом, кулисой, подачей топлива и бортовыми фрикционами, При разработке системы были полностью сохранены штатные механизмы управления движением танка. Испытания показали, что применение системы автоматизированного управления движением снижает утомляемость механика-водителя, сохраняя одинаковые эксплуатационные показатели по сравнению с серийными танками. Вместе с тем, конструкция исполнительных механизмов требовала совершенствования для повышения надежности работы.
Введение на танках гирополукомпасов, позволявших определять положение танка по курсу относительно земных координат, и сервоприводов управления поворотом создало предпосылки для автоматизации процесса вождения за счет поддержания задаваемого направления прямолинейного движения. Необходимость такой автоматизации исходила из особенностей вождения танков по пересеченной местности, когда вследствие неравномерного натяжения гусениц, наличия боковых скосов и косогоров танк произвольно отклонялся от заданного направления и требовалось постоянное вмешательство механика-водителя с целью возращения машины на заданный курс даже на прямолинейных трассах.
Для улучшения условий работы механика-водителя, уменьшения нагрузок и увеличения его работоспособности, а также возможности создания системы дублированного управления движением танка в конце 1950-х гг. во ВНИИ-100 инженерами A.M. Мнускиным, Б.З. Шапиро, А.Д. Ледовским и Т.В. Талаквадзе был разработан специальный курсовой автомат (ТКА). Он обеспечивал необходимую динамическую точность поддержания заданного механиком-водителем прямолинейного курса в условиях непрерывно действовавших при движении танка возмущений (рельеф местности, износ гусеничного движителя и др. факторы) и производил передачу управляющих сигналов в сервоприводы управления и подготовку к режиму стабилизации на новом курсе. Изготовленный образец ТКА прошел испытания в опытном танке Т-55. Результаты испытаний подтвердили улучшение условий работы механика-водителя, уменьшение его нагрузки (сокращение числа воздействий на органы управления танка при вождении) при использовании курсового автомата, а также создали предпосылки к проведению дальнейших работ в направлении создания системы дублированного управления движением танка и, в частности, систем дистанционного управления поворотом и переключения передач.
Исследования в этом направлении были продолжены в конструкторских бюро ЦЭЗ-1 в Москве и завода №174 в Омске. Однако в первую очередь они были связаны с продолжением работ по радиоуправляемым (телемеханическим танкам) и созданием танков-мишеней для отработки систем управления различных ПТРК, разрабатывавшихся для истребителей танков – танков с управляемым ракетным оружием.
Так в результате НИОКР, проведенных КБ завода №174 совместно с ЦНИИ-174 ГКОТ и НИИ-592 ГКРЭ, в 1959-1961 гг. была создана система телеуправления трансмиссией опытных радиоуправляемых танковых мишеней на базе Т-55 («Объект 601А» и «Объект 601 Б»). Она представляла собой автоматизированный электрогидравлический привод с управлением от кнопочного пульта и по радиоканалу. В качестве источника энергии для питания гидропривода использовалась питающая установка с блоком аккумуляторов. Система обеспечивала пуск и глушение двигателя; трогание и остановку машины; переключение передач (с автоматическим понижением передачи при увеличении сопротивления движению); повороты на первом и втором положениях ПМП; переключение радиостанции с передачи на прием для прослушивания сигналов о работе двигателя и о перегреве охлаждающей жидкости и масла.
Дистанционное управление коробкой передач осуществлялось по двум командам: «Скорость больше» и «Скорость меньше», подававшимся на исполнительные цепи автоматики. Датчик автоматического переключения имел настройку по частоте вращения коленчатого вала двигателя, соответствовавшей той или иной передаче с учетом их перекрытий. Переключение на высшую передачу происходило при частоте вращения коленчатого вала двигателя равной 2020 мин 1 и максимальном положении привода подачи топлива, на низшую – при 1300 мин-1 и положении привода подачи топлива для холостого хода.
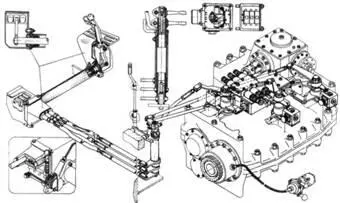
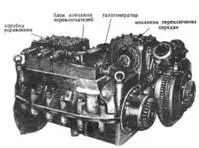
Коробка передач с приводами управления танка Т-62 («Объект 612»).
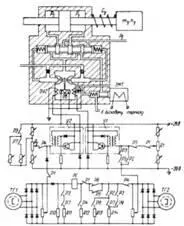
Принципиальная схема следящей системы центральной автоматической синхронизации полуавтоматического управления танка Т-62 («Объект 612»).

Оборудование рабочего места водителя в башне ходового макета на базе танка Т-55.
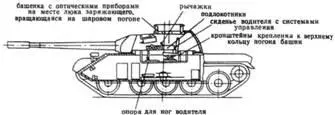
Схема ходового макета на базе танка Т-55 с размещением водителя в башне.
Читать дальшеИнтервал:
Закладка: