Иван Шунейко - Пилотируемые полеты на Луну

- Название:Пилотируемые полеты на Луну
- Автор:
- Жанр:
- Издательство:Государственный Комитет Совета министров СССР по науке и технике
- Год:1973
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Шунейко - Пилотируемые полеты на Луну краткое содержание
Выпуск Итоги науки и техники из серии Ракетостроение, том 3, «Пилотируемые полеты на Луну, конструкция и характеристики Saturn V Apollo» является обзором и систематизацией работ, информация о которых опубликована в изданиях ВИНИТИ АН СССР в 1969—1972 гг.
В томе 3 описываются конструкция, весовые, летные характеристики и космические летные испытания ракеты-носителя Saturn V и корабля Apollo. Рассматриваются системы управления корабля Apollo, принципы прицеливания траектории полета Земля-Луна-Земля, навигация, коррекция траектории полета, методы аварийного возвращения.
Описываются полеты на Луну кораблей Apollo-11, 12, 13, 14, 15, 16 и 17, анализируется механика полета, посадка на Луну, взлет с Луны и возвращение на Землю.
Библиографический обзор литературы и рефератов, опубликованных в изданиях ВИНИТИ АН СССР, приводится в конце каждой главы.
Выпуск рассчитан на научных работников, инженеров-конструкторов, специалистов по испытанию и эксплуатации, преподавателей, аспирантов, работающих в области астронавтики, космической ракетной техники и авиации. Книга предназначается и для специалистов смежных с астронавтикой наук, интересующихся космической ракетной техникой, обеспечивающей полет человека на Луну.
Пилотируемые полеты на Луну - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Режим работы цифрового автопилота лунного корабля
Режимы работы ЦАП лунного корабля определяются необходимостью обеспечить все этапы полета лунного корабля no программе полета Apollo с посадкой на Луне. Режимы полета включают: маневры ориентации относительно центра масс на произвольные углы, стабилизацию заданной ориентации, поступательные перемещения с помощью ЖРД РСУ, маневрирования на активных участках траектории полета посадочной и взлетной ступеней лунного корабля. Ниже приводится перечень режимов работы ЦАП лунного корабля.

Описание цифрового автопилота лунного корабля
Необходимая информация для решения задач управления ЦАП поступает с гиростабилизированной платформы блока инерциальных измерений. Информация об угловой ориентации аппарата снимается непосредственно с рамок и подается в блок преобразования данных. Информация о поступательных перемещениях снимается с импульсных интегрирующих маятниковых акселерометров, расположенных на гиростабилизированной платформе. Специальные датчики угловой скорости не применяются. Оценка угловой скорости (с последующей фильтрацией) и возмущающего ускорения производится ЦАП лунного корабля.
ЦАП лунного корабля состоит из трех подсистем: расчета ориентации, законов управления ЖРД РСУ и законов управления вектором тяги ЖРД посадочной ступени. Законы управления ЖРД РСУ разделены на 3 отдельных канала, Р, U, V. Законы управления отклонением вектора тяги ЖРД посадочной ступени разделяются на 2 канала Q и R. Расчет точной настройки отклонения вектора тяги для каждого канала основывается на независимом законе управления в одной плоскости.
Основной период квантования автопилота 0,1 сек, но обычно для выполнения расчетов ЦАП требуется 0,025 сек. В дополнение к основной программе ЦАП имеется спецпрограмма, которая на активном участке траектории полета выполняется каждые 2 сек, приводит в соответствие цепи автопилота, зависящие от уменьшения массы аппарата, и рассчитывает смещение углового ускорения от действия тяги главного ЖРД.
На рис. 24.2 изображена блок-схема управления стабилизацией аппарата на пассивных участках траектории полета.
Основными элементами системы являются блок оценки угловых переменных, блоков законов управления ЖРД РСУ, блок логики выбора ЖРД РСУ.
В алгоритме оценки угловых переменных в качестве основных измеряемых величин используются углы отклонения инерциальной стабилизированной платформы. На пассивном участке траектории полета в алгоритме оценки вырабатываются как угол, так и угловая скорость. При этом применяется нелинейная пороговая логика для подавления шумов измерения низкого уровня. Информация об угловом ускорении при включении ЖРД РСУ также вводится в алгоритм оценки. Управляющие импульсы формируются с помощью законов управления на основе информации об ошибке ориентации, эффективности управления и логических функций на фазовой плоскости. В блоке логики выбора ЖРД РСУ, осуществляется выбор включения ЖРД, в которых сочетается создание требуемых моментов с необходимым направлением поступательного перемещения. Кроме того, в системе имеется временная логика включения ЖРД РСУ для определения условий управления относительно осей U, V двумя ЖРД РСУ, а относительно оси Р четырьмя ЖРД.
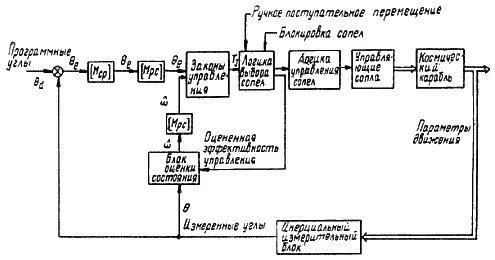
Рис. 24.2. Блок-схема управления стабилизацией.
На рис. 24.3 изображена блок-схема автоматического управления ориентацией аппарата на пассивных участках траектории полета.
Автоматическое управление ориентацией осуществляется при помощи тех же логических операций, что и стабилизация ориентации, но с добавлением программы изменения ориентации. Эта программа вычисляет требуемые управляющие команды по углу и угловой скорости и ряд углов запаздывания ?. Углы запаздывания вводятся для предотвращения перерегулирования в начале и в конце маневра. Упрощенные уравнения программы маневра изменения ориентации имеют вид:
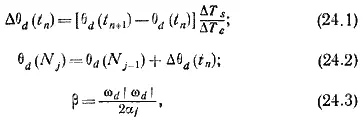
где уравнение (24.1) решается с периодом цикла управления траекторией полета (?Тc=Nj—Nj-1=2 сек), а уравнение (24.2)—с периодом цикла управления ориентацией (T=0,1 сек). Величина ?d задается угловой скоростью маневра, а величина ?j определяется как предполагаемое угловое ускорение от двух ЖРД РСУ. По окончании маневра величины ?d, ??d и ? обнуляются и система возвращается к режиму стабилизации вновь заданной ориентации.
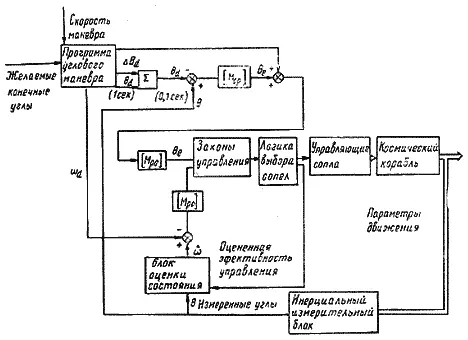
Рис. 24.3. Блок-схема автоматического управления ориентацией лунного корабля на пассивных участках траектории полета.
Автоматическое управление аппаратом на активных участках траектории полета значительно сложнее, чем на пассивных. На активных участках к программе ЦАП управления ориентацией добавляются программа управления траекторией полета, программа вычисления массы корабля, в алгоритме оценки определяется угловое ускорение а; законы управления ЖРД РСУ видоизменяются таким образом, чтобы по оцененному значению углового ускорения ввести поправку в текущее значение эффективности управления; на участках снижения и посадки на Луну осуществляется управление величиной и направлением вектора тяги посадочного ЖРД, с учетом взаимодействия с ЖРД РСУ.
Масса корабля и тяга ЖРД рассчитываются ЦАП каждые 2 сек по уравнениям

Эти расчеты вводятся в цепь настройки ЦАП. Эффективность управления ЖРД РСУ относительно осей Р, Q, R рассчитывается по уравнению

где аj – угловое ускорение корабля; С1, С2, С3 – константы пропорциональные оставшейся массе.
Выбор констант С1, С2, С3 осуществляется для каждой оси и каждой конфигурации аппарата – посадочной и взлетной.
Таким образом подсчитанные величины ортогональных компонентов угловых ускорений ?qu и ?ru затем пересчитываются относительно оси V' для определения ?u'u. Вследствие инерциальной симметрии значения ?u'u можно использовать и для расчетов относительно оси V.
Эффективность сигнала управления вектором тяги посадочного ЖРД рассчитывается по уравнению
Читать дальшеИнтервал:
Закладка: